Multi-source fusion vehicle-mounted unmanned aerial vehicle autonomous landing control method and device
A vehicle-mounted unmanned aerial vehicle and a control method technology, which is applied in the field of autonomous landing control of vehicle-mounted unmanned aerial vehicles, can solve the problems of personal safety hazards, poor positioning accuracy, low landing success rate, etc., and achieves low software and hardware requirements, simple algorithms, and improved Effects of Accuracy and Safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
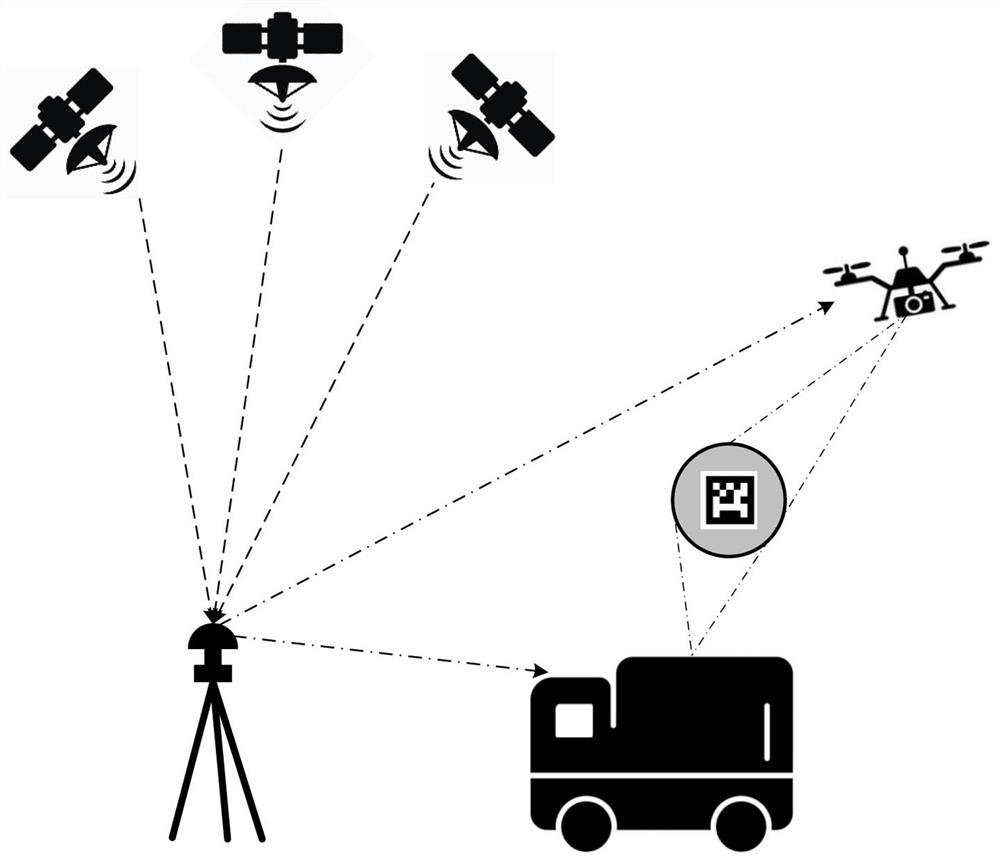
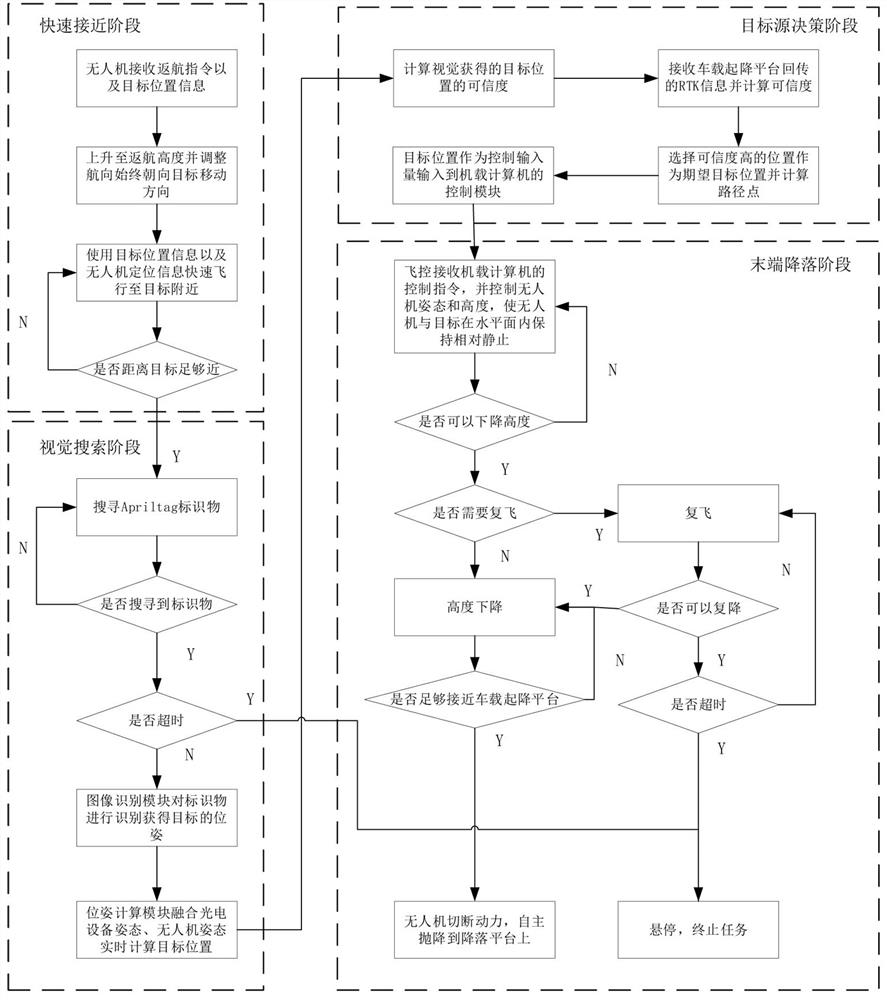
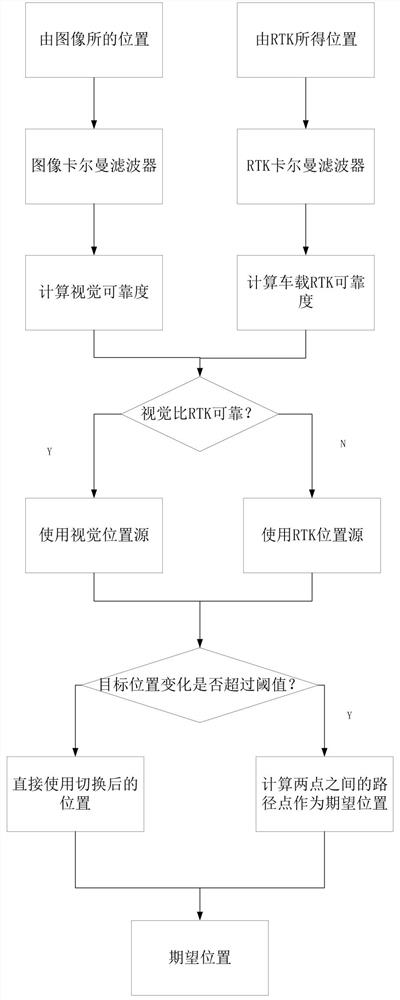
[0049] Aiming at the problem of autonomous landing of the vehicle-mounted drone in the high-speed movement of the vehicle-mounted take-off and landing platform, the solution of the present invention is to integrate RTK positioning and visual positioning, and abandon the complex information fusion algorithm. By comparing the RTK positioning module and visual positioning The reliability of the target position of the module and the target position information of the positioning module with higher target position reliability are selected as the navigation information source for controlling the autonomous mobile and landing of the vehicle-mounted UAV, thereby effectively improving the accuracy and safety of the autonomous mobile and landing of the UAV. sex.
[0050] In order to facilitate the public's understanding, the technical solutions of the present invention will be described in detail below through a specific embodiment and in conjunction with the accompanying drawings:
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com