Heterogeneous multi-unmanned-platform space-time cooperation task allocation method
An unmanned platform and task distribution technology, applied in the direction of position/direction control, instruments, control/adjustment systems, etc., can solve problems such as difficulty in meeting actual needs, load capacity, and different moving speeds and moving routes, and achieve good scientific research and Engineering value, improve search efficiency, and help to find the optimal path
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described in detail below with reference to the accompanying drawings and specific embodiments.
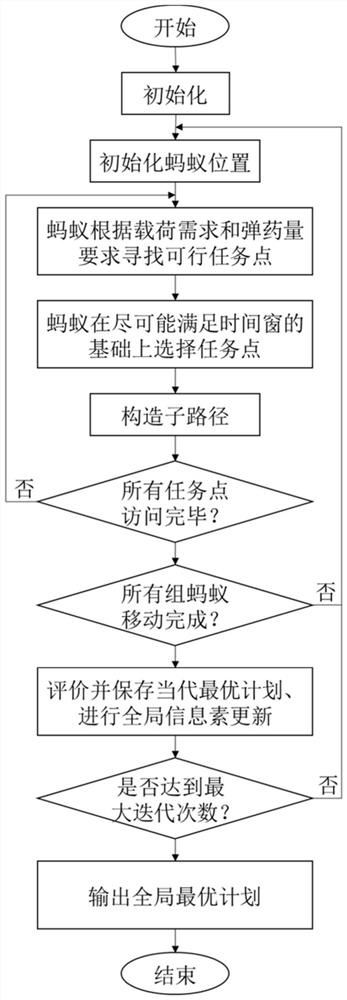
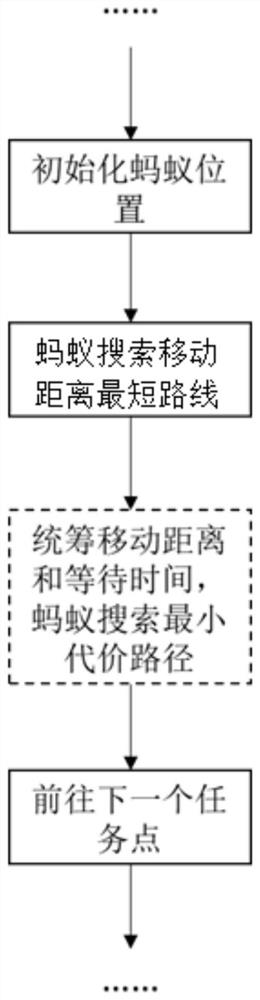
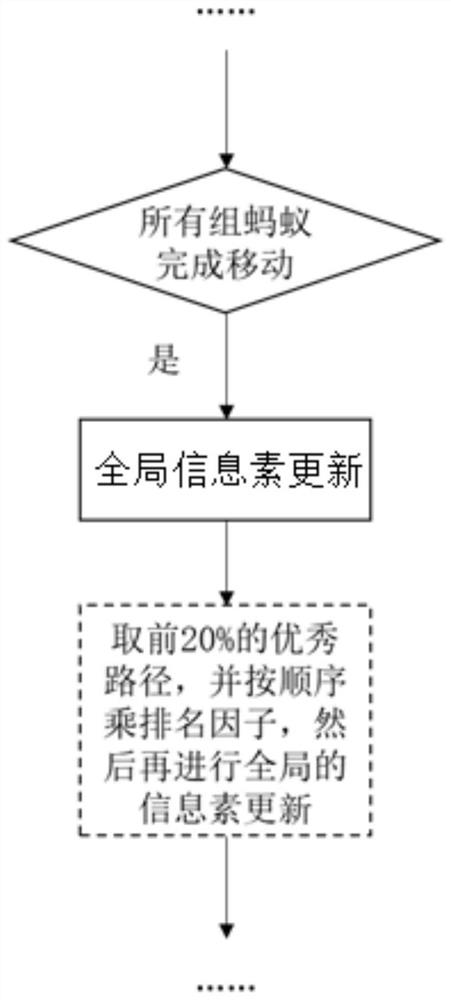
[0039] like Figure 1-Figure 4 As shown in the figure, a method for distributing space-time cooperative tasks for heterogeneous multi-unmanned platforms in the present invention is actually a method for distributing space-time cooperative tasks for heterogeneous multi-unmanned platforms based on an improved ant colony algorithm; the steps of the present invention include:
[0040] Step S1: read the task data to be executed and store;
[0041] In a specific application example, the mission data includes, but is not limited to, mission sequence, mission time window, load requirement, water bomb quantity requirement, current map information, road accessibility and other data.
[0042] Step S2: correspondingly divide the loads required by the task into different categories;
[0043] Specifically, one kind of the load can correspond to a v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com