Inspection robot high-intensity magnetic field interference resisting system and method
A technology of inspection robot and interference system, applied in the field of inspection robot anti-strong magnetic field interference system, can solve the problems of difficult manual inspection, high risk, harsh installation environment, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
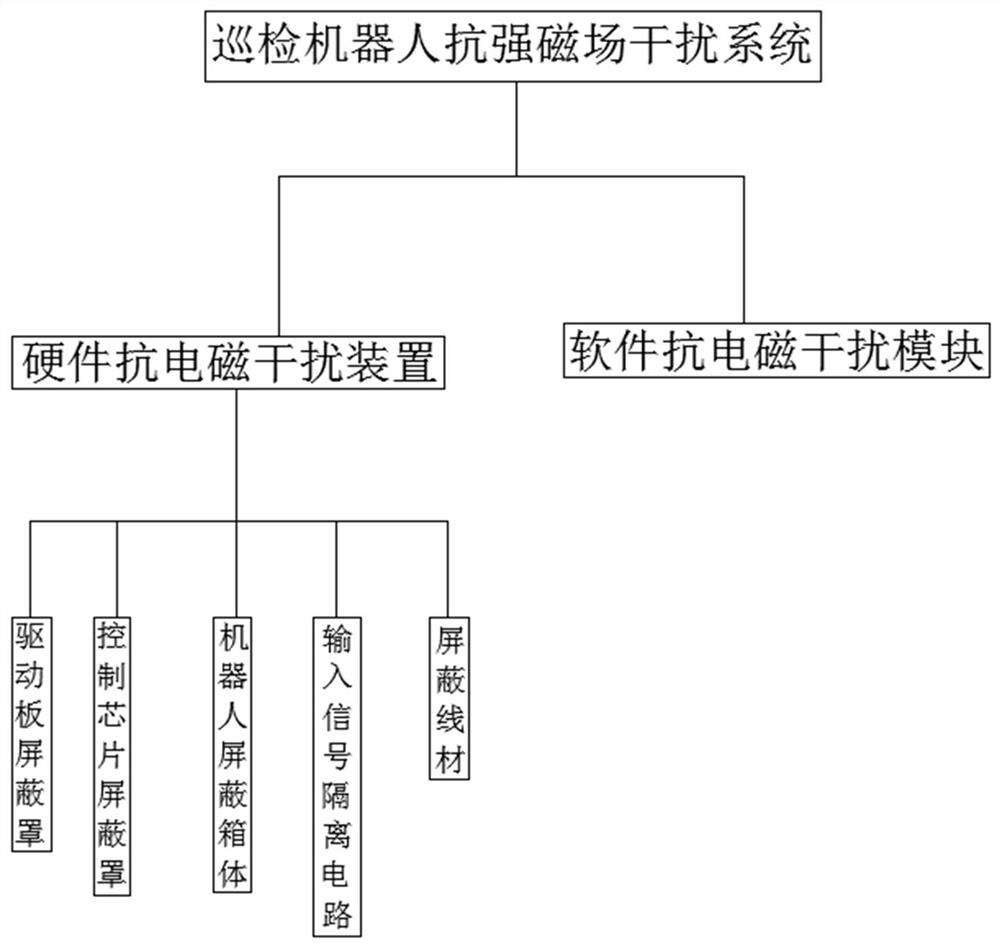
[0032] A patrol robot anti-strong magnetic field interference system, including a hardware anti-electromagnetic interference device and a software anti-electromagnetic interference module, the hardware anti-electromagnetic interference device includes a drive board shield, a control chip shield, a robot shield box, and an input signal isolation Circuits and shielding wires, the software anti-electromagnetic interference module includes reducing the use of while waiting statements in the algorithm; the driver board shield is made of aluminum, integrally formed by die-casting, divided into upper and lower parts, fixed by bolts, and left outside There is a wire interface; the control chip shielding cover is wrapped with copper foil, and the inner and outer sides of the control chip shielding cover are provided with insulating layers; the robot shielding box is welded by aluminum plates; the input signal isolation circuit includes isolation diodes and Peripheral circuit; the inside...
Embodiment 2
[0037] A method for anti-strong magnetic field interference of an inspection robot anti-strong magnetic field interference system, characterized in that:
[0038] Step 1: Equip the AC stabilized power supply in the input power part of the upper computer, and select the AC voltage stabilizer with anti-interference ability and ferromagnetic resonance mode;
[0039]Step 2: Install a 1000VA isolation transformer in front of the working power supply of the upper computer to protect the grid from spike interference caused by strong magnetic fields;
[0040] Step 3: Install switching power supplies on the upper and lower computers to prevent overvoltage or undervoltage problems when the grid voltage changes in a wide range due to strong magnetic fields;
[0041] Step 4: Install a power filter on the lower computer to protect against the peak interference pulses generated by the power grid caused by the strong magnetic field;
[0042] Step 5: For communication cables and ordinary cab...
PUM
| Property | Measurement | Unit |
|---|---|---|
| thickness | aaaaa | aaaaa |
| thickness | aaaaa | aaaaa |
| thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com