Four-wheel steering and four-wheel driving intelligent chassis stability control method
A stability control, four-wheel drive technology, applied in the field of automotive control, to reduce requirements, improve system response, and maintain stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
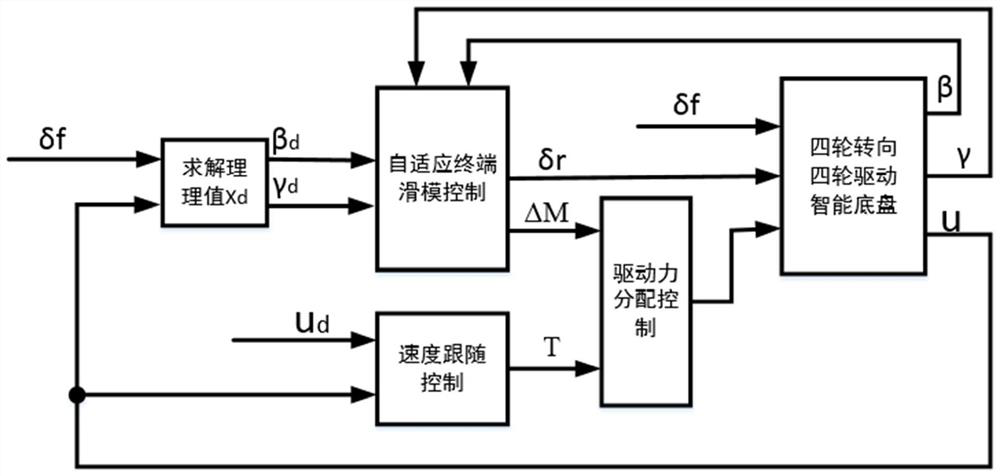
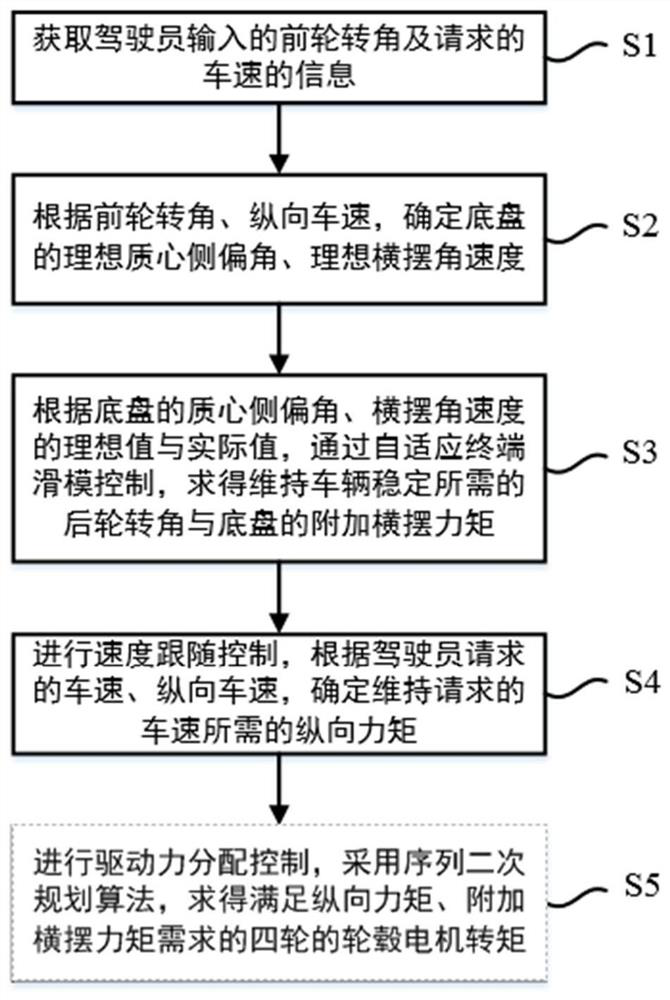
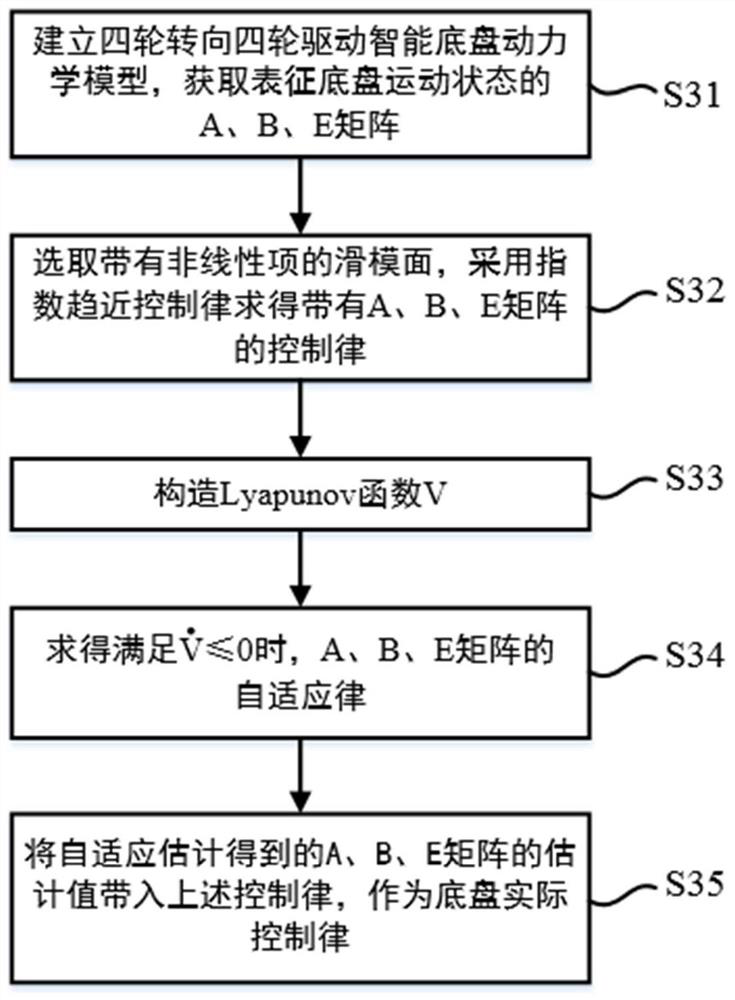
[0088] The frame diagram and flow chart of the four-wheel steering four-wheel drive intelligent chassis stability control method of the present invention are shown in figure 1 and figure 2 , the flow chart of adaptive terminal sliding mode control in the control method of the present invention is shown in image 3 .
[0089] In order to verify the effectiveness of the inventive method, the embodiment of the following working conditions has been selected for analysis:
[0090] (1) Working condition 1: Front wheel step steering working condition with a longitudinal speed of 90km / h
[0091] The longitudinal speed is 90km / h, and the front wheel rotation angle changes from 0° to 2° in 2-2.5 seconds. In working condition 1, the response curve of the side slip angle of the center of mass and the yaw rate is as follows: Figure 4 and Figure 5 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com