Autonomous underwater robot wireless sensor network with dynamic nodes
A technology of underwater robots and wireless sensors, applied in network topology, wireless communication, transmission systems, etc., can solve problems that cannot meet the needs of ocean floating dynamic environment information collection, and achieve rich functions, strong performance, and fast information collection Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
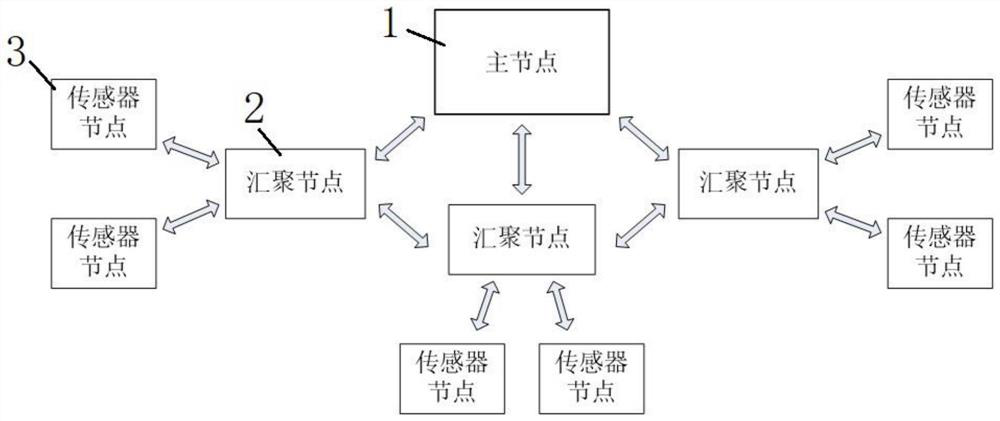
[0058] Such as figure 1 As shown, a kind of autonomous underwater vehicle (AUV) wireless sensor network with dynamic nodes provided by this embodiment includes a master node 1 as a water surface gateway, a sink node 2 and a sensor node 3 as an information relay transmission intermediary,
[0059] The main node 1 includes the radio modem of the surface part and the acoustic modem of the underwater part; the transit hub node that connects the underwater wireless sensor network with the conventional communication network. Among them, the master node is used to receive the data information transmitted by the underwater wireless sensor network, and then convert the uploaded underwater information according to the radio or Ethernet protocol, and then forward it.
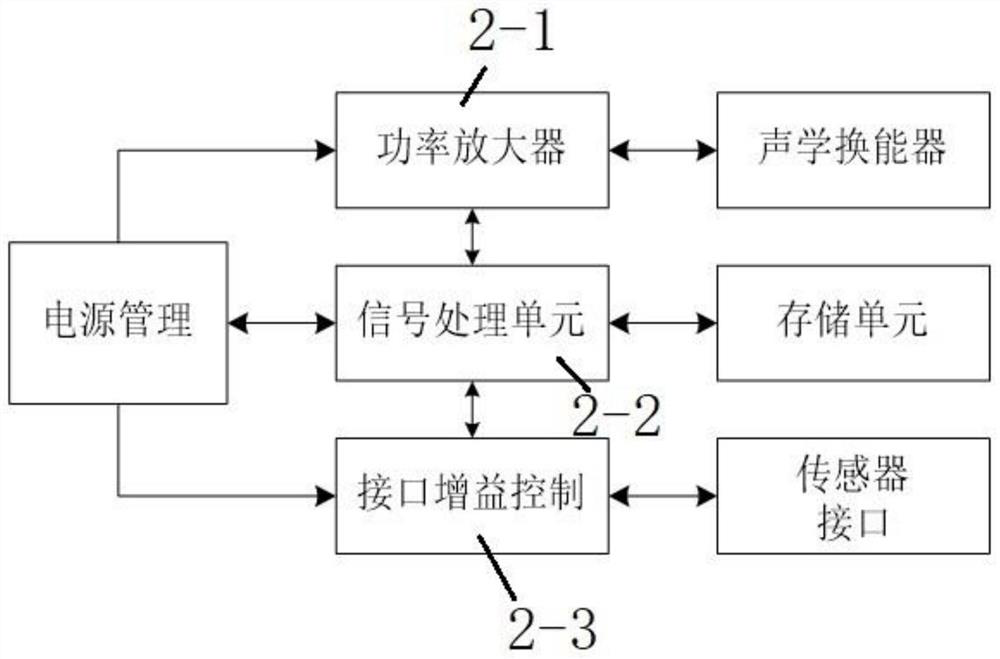
[0060] Such as figure 2 As shown, the aggregation node 2 includes a power amplifier 2-1, a signal processing unit 2-2, and an interface gain control module 2-3 for performing data transmission and communication with it r...
Embodiment 2
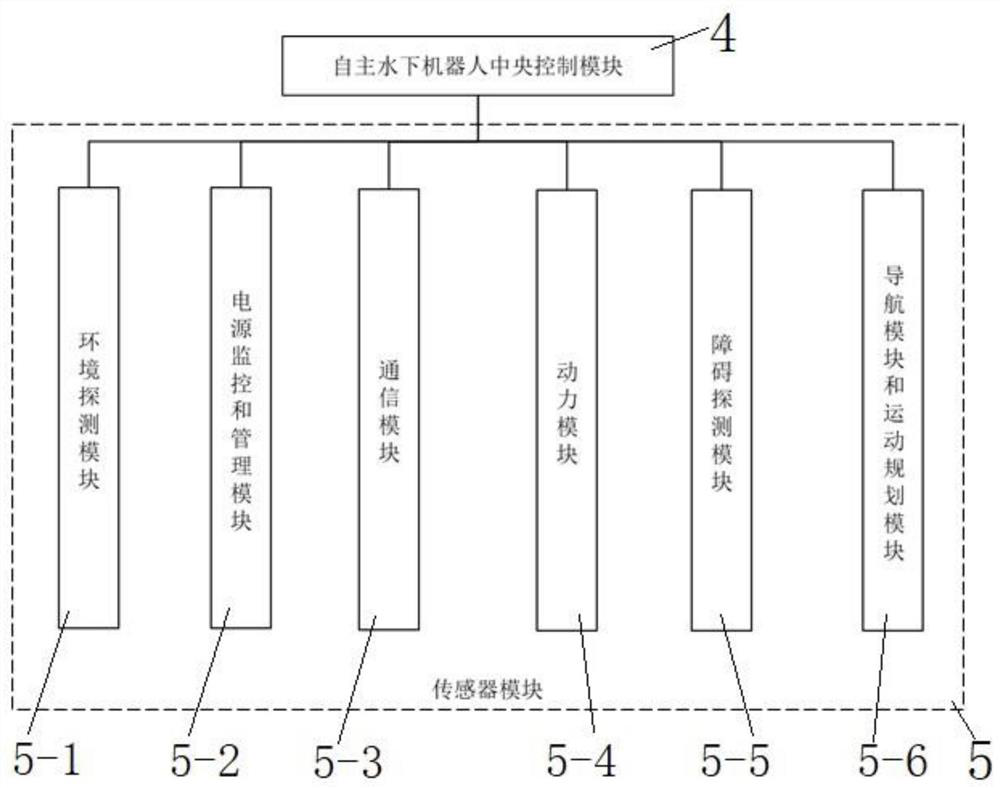
[0070] This embodiment provides the navigation method of the navigation module and the motion planning module 5-6 in Embodiment 1, including the following steps:
[0071] 1) Construct the horizontal motion model of the autonomous underwater robot in the geocentric coordinate system:
[0072]
[0073] where u is the surge linear velocity of the autonomous underwater vehicle, v is the sum linear velocity of the autonomous underwater vehicle, r is the yaw angular velocity of the autonomous underwater vehicle; x is the coordinate of the center of mass of the autonomous underwater vehicle in the direction of surge, y is the coordinate of the sway direction of the center of mass of the autonomous underwater vehicle, and ψ is the target direction of the autonomous underwater vehicle;
[0074] 2), while ignoring the heave, roll and pitch motions, construct the lateral dynamics model of the autonomous underwater vehicle coordinate system of the autonomous underwater vehicle:
[0075]...
Embodiment 3
[0103] The difference between this embodiment and Embodiment 1 is that the master node 1 is built by a buoy or a ship, and when the above-water part is a radio modem and the underwater part is an acoustic modem, the master node 1 is used as a water surface gateway.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com