Modularized dexterous hand mechanical structure
A mechanical structure and dexterous hand technology, applied in the field of robotics, can solve problems such as the difficulty of pinching and grasping thin objects with fingertips, the difficulty of ensuring stable and reliable grasping actions, and the weakening of the anthropomorphic effect of dexterous hands. Convenience, stable grip, and reduced bulk
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033]The technical solutions of the present invention will be further described in further detail below in conjunction with specific drawings and examples, and is not intended to limit the scope of protection of the present application.
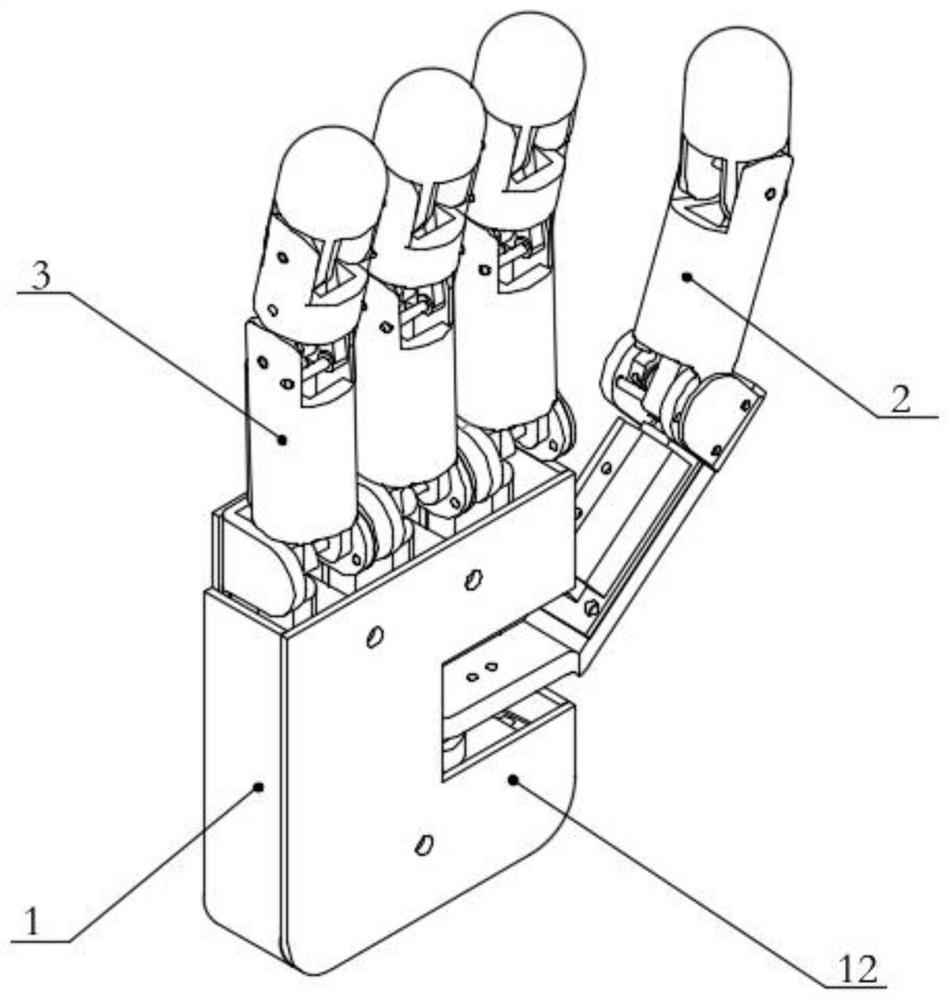
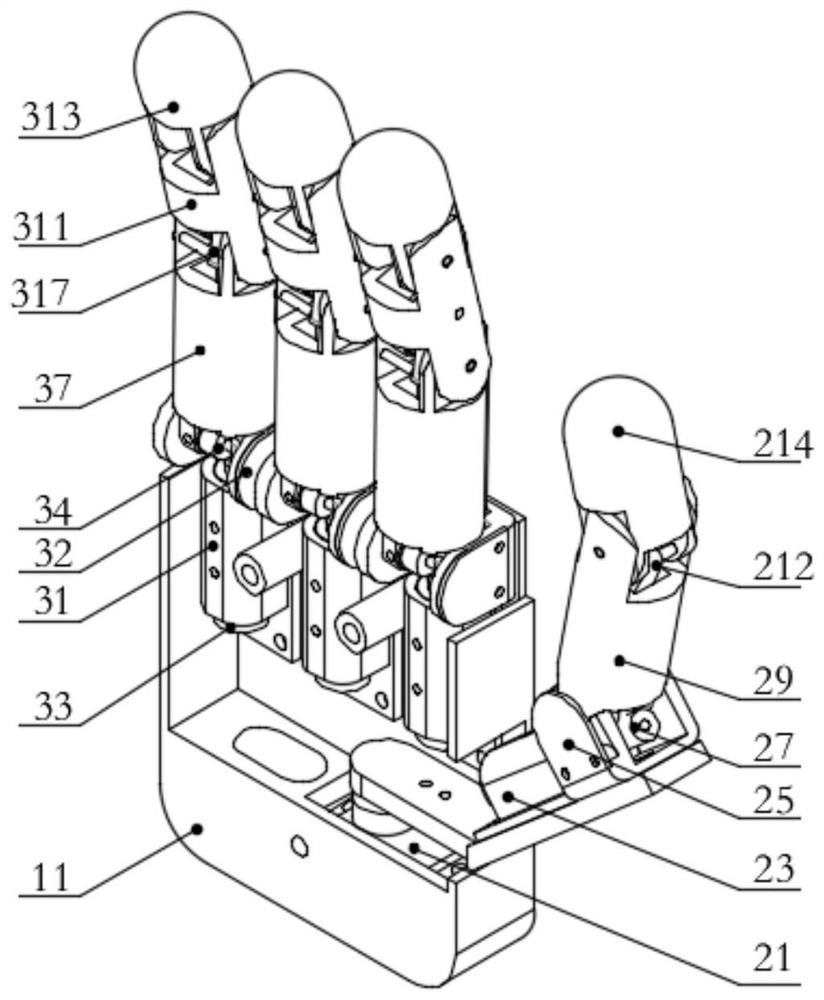
[0034]The present invention is a modular consractive mobile phone structure (referred to as spiritual hand, seeFigure 1-7), Including palms, thumb, three or four fingers; when three fingers, the index finger, middle finger, and unknown refers to the index finger, because the hand is completing the grasp or pinching, the small finger is only aid, and the robot is realized. Basic functions, omitting the small finger can reduce costs; including four fingers, the index finger, middle finger, ring finger and small finger;
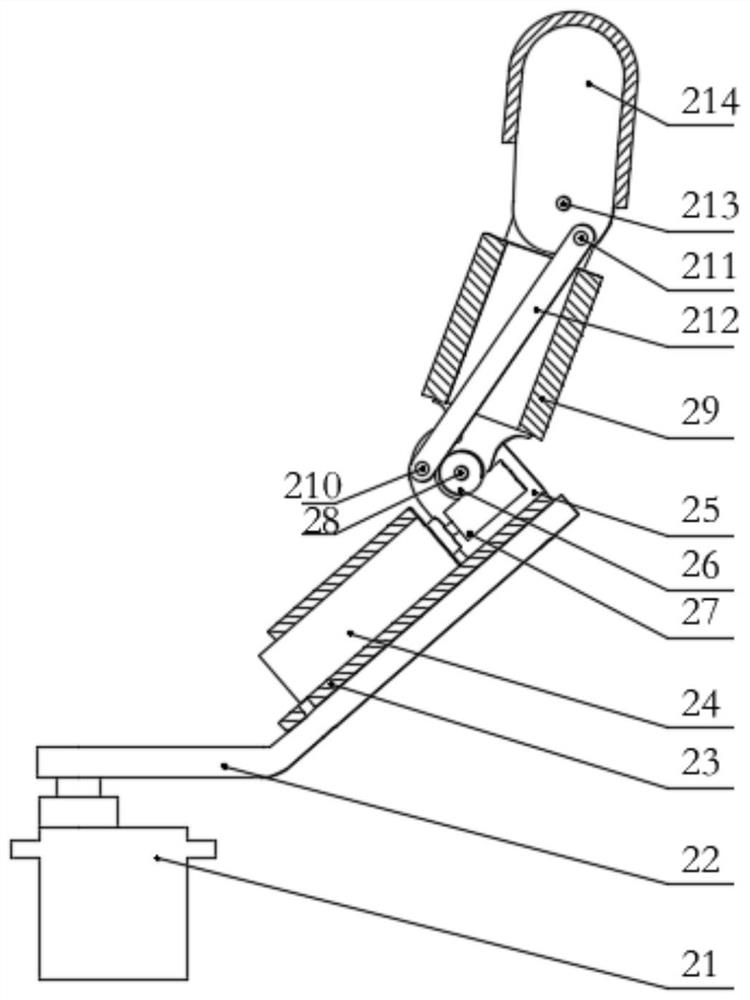
[0035]The thumb includes a thumb drive 21, a thumb pedestal 22, a thumb-based finger section 23, a thumb-based edge motor 24, a thumb, a knot, thumb, a worm, a thumb, a worm 27, a thumb, a knot, a thumb Joint shaft 28, thumb nearly referr...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
| Length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com