Method and system for cutting acetabular cup based on mechanical arm
A robotic arm and acetabular cup technology, applied in the field of cutting acetabular cups based on robotic arms, can solve the problems of low cutting accuracy and efficiency, improve cutting accuracy, improve cutting efficiency and stability, and eliminate the displacement of pendulum saws The effect of instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] The present invention is further illustrated below by means of examples, but the present invention is not limited to the scope of the examples.
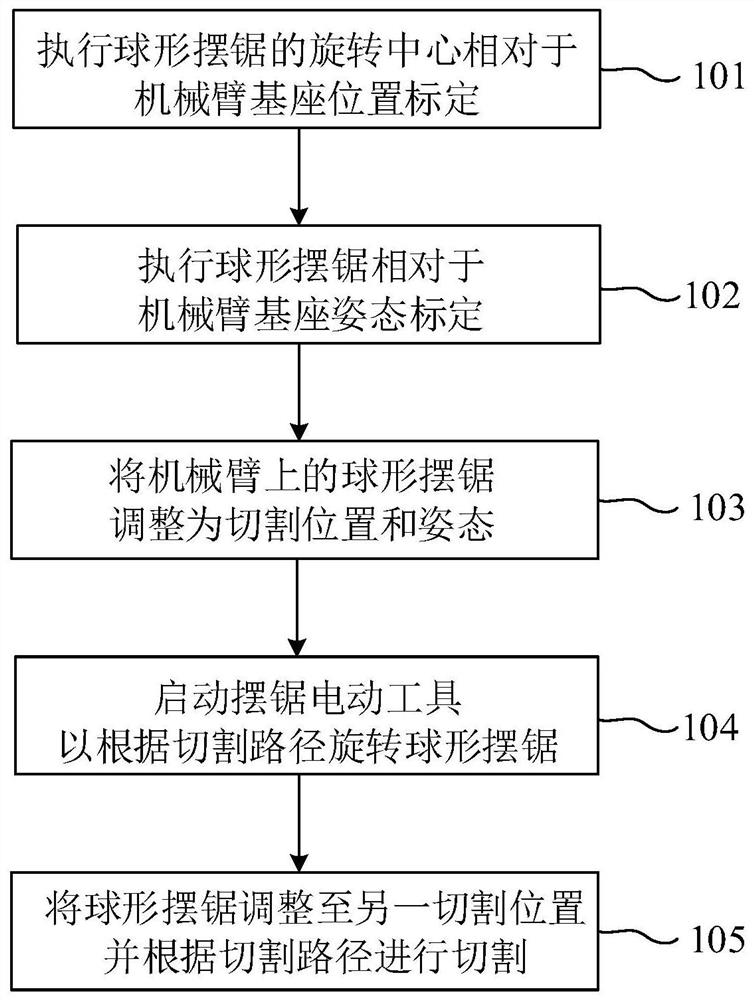
[0088] In order to overcome the above-mentioned defects currently existing, the present embodiment provides a method for cutting an acetabular cup based on a robotic arm, including: performing calibration of the center of rotation of the spherical pendulum saw relative to the position of the base of the robotic arm for installing the ball pendulum saw; Calibrate the attitude of the ball pendulum saw relative to the base of the robotic arm; determine the current position and attitude of the ball pendulum saw on the robotic arm and adjust the current position and attitude to the cutting position and attitude; rotate the ball pendulum saw according to the pre-planned cutting path to Cut out the spherical acetabular cup.
[0089] In this embodiment, the spherical acetabular cup is automatically cut out by the robotic arm, which ef...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com