Motor train unit train side foreign matter detection method
A foreign object detection and EMU technology, applied in the field of image processing, can solve the problems of low detection efficiency and accuracy, and achieve the effect of ensuring gray balance, improving detection efficiency, accuracy and efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
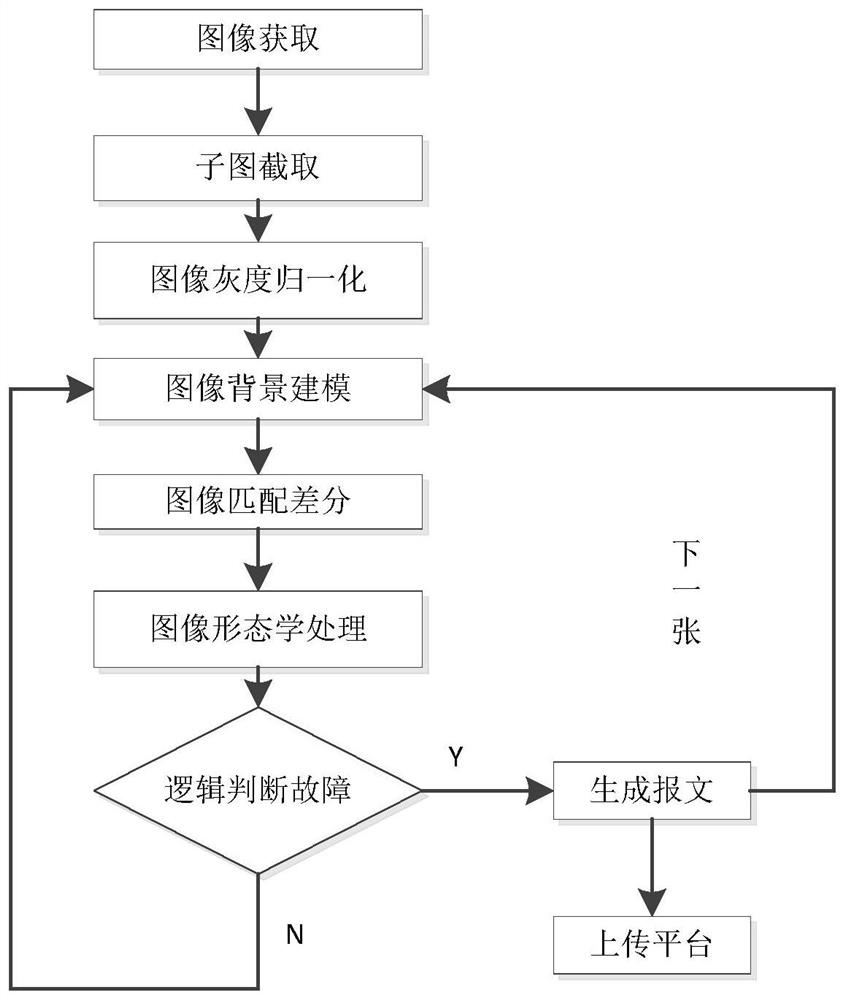
[0029] Specific implementation mode one: refer to figure 1 and figure 2 This embodiment is specifically described. A method for detecting foreign matter on the side of an EMU train described in this embodiment includes the following steps:
[0030] Step 1: Obtain a two-dimensional image of the train;
[0031] Step 2: Capture the image of the side skirt area of the train:
[0032] Step 3: Carry out grayscale normalization processing on the image of the side skirt plate area of the train;
[0033] Step 4: Carry out background modeling according to the fixed features of the train side skirt area image;
[0034] Step 5: performing differential matching on the normalized image of the side skirt area of the train and the background model corresponding to the image of the side skirt area of the train;
[0035] Step 6: Perform morphological processing on the image after differential matching:
[0036] Step 7: Set the area threshold, the length, width threshold and aspect...
specific Embodiment approach 2
[0046] Embodiment 2: This embodiment is a further improvement to Embodiment 1. The difference between this embodiment and Embodiment 1 is that the specific steps of step 3 are:
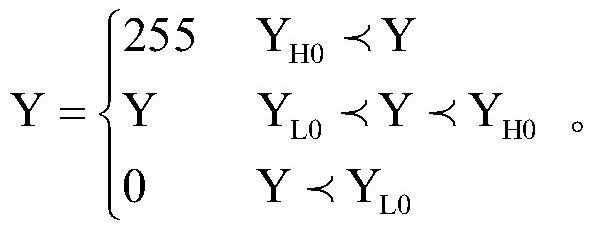
[0047] According to the fixed characteristics of the train side skirt area image and the pixel value of the two-dimensional image of the train, the high pixel value ratio threshold R of the image is obtained H0 And image low pixel value ratio threshold R L0 , and then divide the pixel values into 255 levels. The size of the currently selected side skirt image is W×H, where W is the width of the image, and H is the height of the image. The pixel value of a certain point in the image is normalized by grayscale The transformed value is Y, where the threshold for high pixel values is Y H0 =W×H×R H0 , the threshold for low pixel values is Y L0 =W×H×R L0 , the value of Y is obtained by the following formula:
[0048]
[0049] Definition of image grayscale normalization
[0050] Gray level nor...
specific Embodiment approach 3
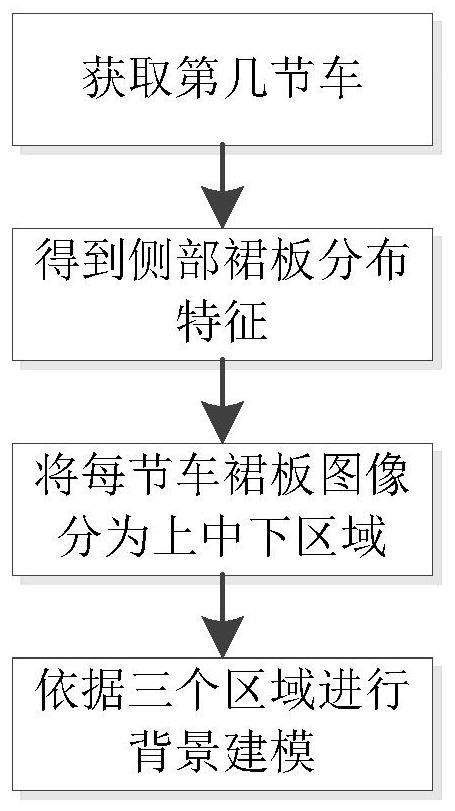
[0055] Specific embodiment three: this embodiment is a further improvement to specific embodiment two, and the difference between this embodiment and specific embodiment two is that the step of background modeling in the step four is: first, the train side skirt plate area image It is divided into upper, middle and lower parts, and the background image is modeled according to the image characteristics of the three parts on different cars.
[0056] background modeling
[0057] According to the inherent component characteristics of the side skirt image of the EMU, the side image is divided into upper, middle and lower areas, and the background modeling is carried out for the images of different cars, which can effectively avoid various covers and bolts and The impact of the grille ensures the accuracy and efficiency of foreign object detection. See the process for details figure 2 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com