Path planning method based on improved ant colony algorithm
An ant colony algorithm and path planning technology, applied in navigation calculation tools, two-dimensional position/channel control, vehicle position/route/height control, etc., can solve the problems of ants prone to stagnation, slow algorithm convergence speed, and long search time and other problems to achieve the effects of reducing blindness, improving operating efficiency, and ensuring convergence speed and
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0034] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. The embodiment is a path method based on the improved ant colony algorithm, and its main flow chart is as follows figure 1 As shown, the specific steps are as follows.
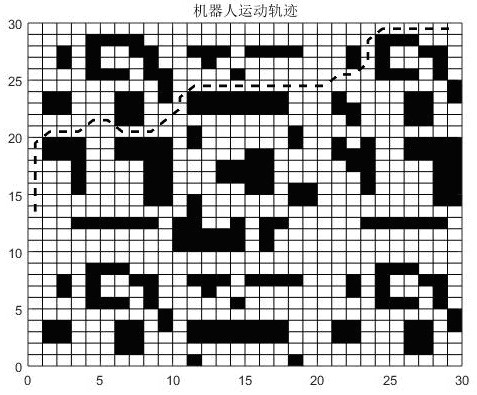
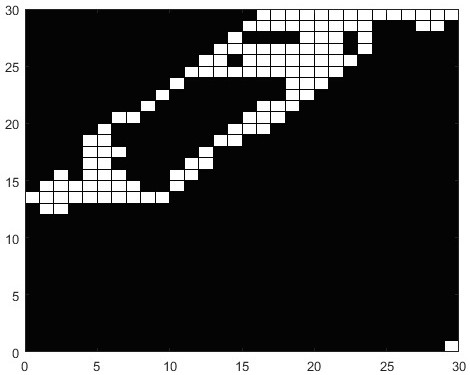
[0035] Step1: Use the grid method to model the working environment of the robot. Set the working state space of the mobile robot as C, and use the grid method to model the working environment of the robot in MATLAB, where the white grid represents the feasible area of the robot, and the black grid represents obstacles, which represent the area that the robot cannot pass through. During the walking process of the robot, the obstacles are in a static state and their size is fixed. The size of the robot is the size of the unit grid. A Cartesian coordinate system is established in the grid environment. A grid represents a position node, and the grid is encoded from left to right...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com