Master-slave isomorphic teleoperation force feedback master manipulator of minimally invasive surgery robot
A robot-driven, minimally invasive surgery technology, applied in the field of medical robotics, can solve the problems of increased inertia of the main hand and reduced flexibility of the main hand, and achieve the effects of stable driving force, hand-eye coordination, and accurate force feedback
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be described in detail below in conjunction with the accompanying drawings. This description is a description of the current preferred embodiment of the system of the present invention, and does not represent the only form that the present invention can be constructed or used.
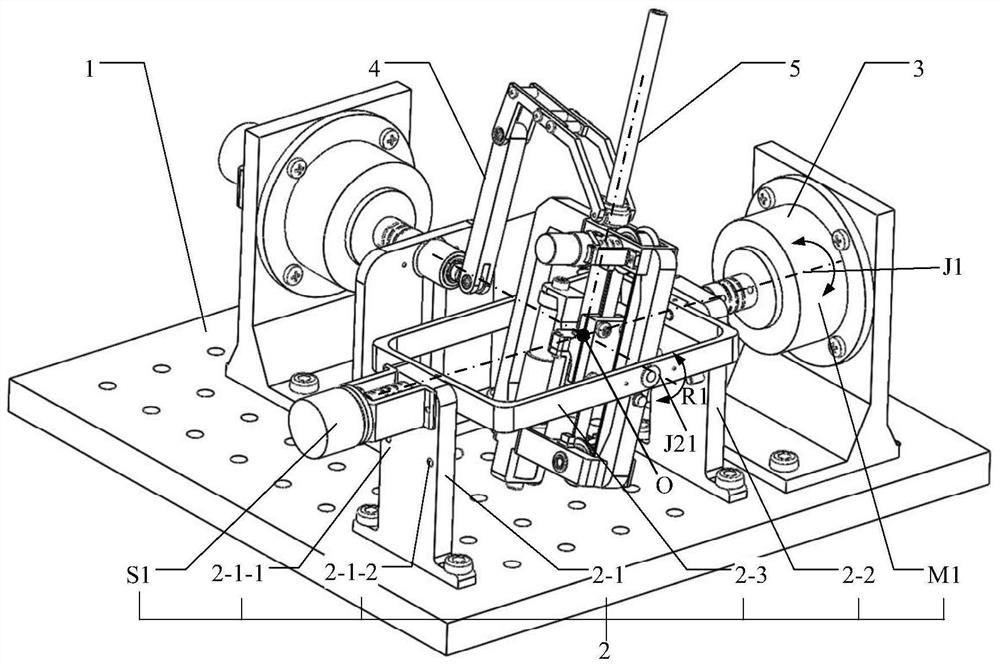
[0031] Such as figure 1 As shown, the minimally invasive surgical robot master-slave isomorphic teleoperation force feedback main hand of the present invention includes:
[0032] Base 1, universal joint mechanism component 2, translational rotation component 3, motion detection and force feedback drive elements for each degree of freedom of motion, parallelogram mechanism 4 and joystick 5, the rotation axes of the two components always intersect at a point O, This point is the RCM point of the main operator.
[0033] Among them, the force feedback of each degree of freedom of motion can use rotating motors, linear motors, and magnetic powder dampers as drive elements;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com