Multi-sensor combined calibration device and method
A joint calibration, multi-sensor technology, applied in the field of sensors, can solve the problems of low degree of automation, cumbersome operation, low accuracy and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
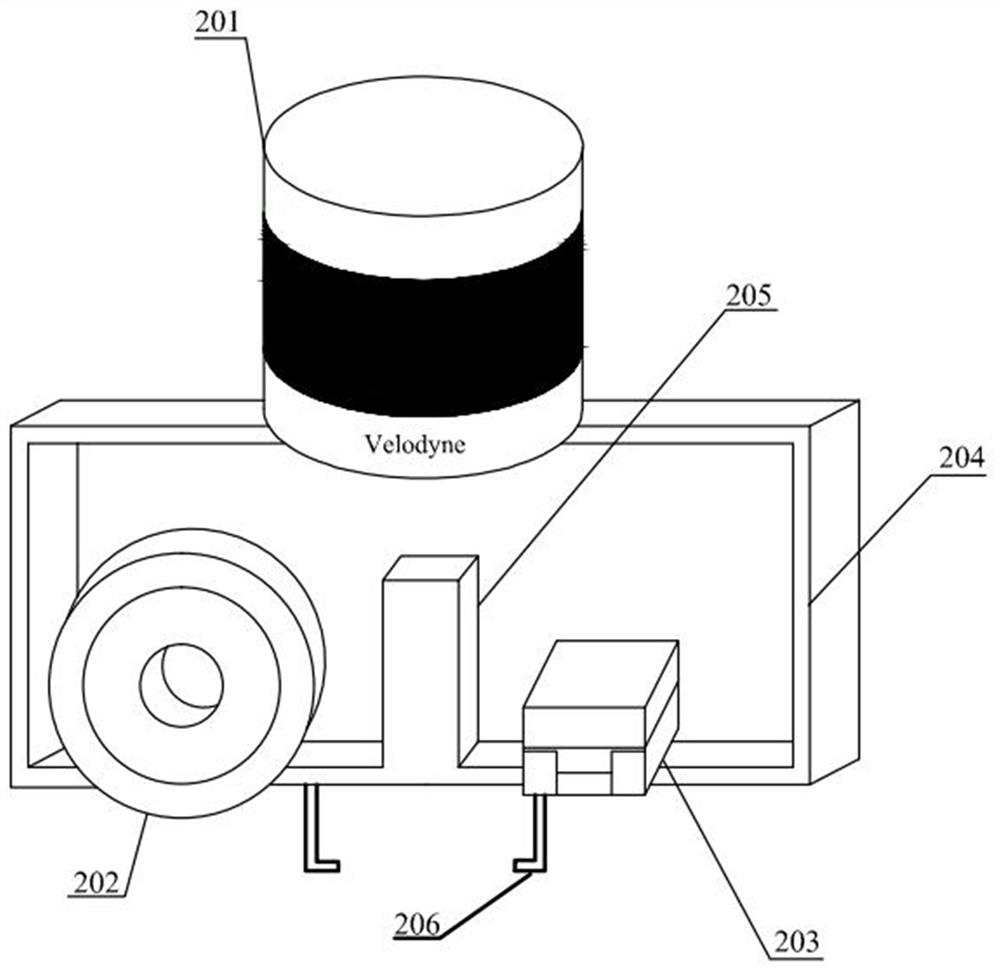
[0044] A multi-sensor joint calibration device, comprising a multi-sensor fusion framework 101, a mechanical arm 102, a connecting mechanism 103, a computer unit 104, and an operating console 105; the multi-sensor fusion framework 101 is constructed by combining a laser radar 201 with a multi-sensor joint construction method , monocular camera 202, and inertial navigation system 203 are fixed under a freely movable metal frame 204, which can be mounted on environment perception occasions such as unmanned vehicles and drones through a clamp 206, which is suitable for secondary development and is convenient For the implementation of external reference calibration; the metal frame is 18cm long, 6cm wide, and 8cm high; a multi-sensor joint construction method is adopted, and each sensor is installed according to the same coordinate system; the laser radar 201 is installed at the center of the top of the metal frame 204, A fixing device 205 is arranged inside the metal frame; the mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com