Deep space exploration spacecraft cruise phase autonomous navigation method based on information fusion
A technology for deep space exploration and autonomous navigation, applied in surveying and mapping and navigation, integrated navigator, navigation, etc., can solve the problems of navigation ephemeris error, poor dynamic model accuracy, large state estimation error, etc., to reduce dependence, high The effect of precision autonomous position determination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further elaborated below in conjunction with embodiment.
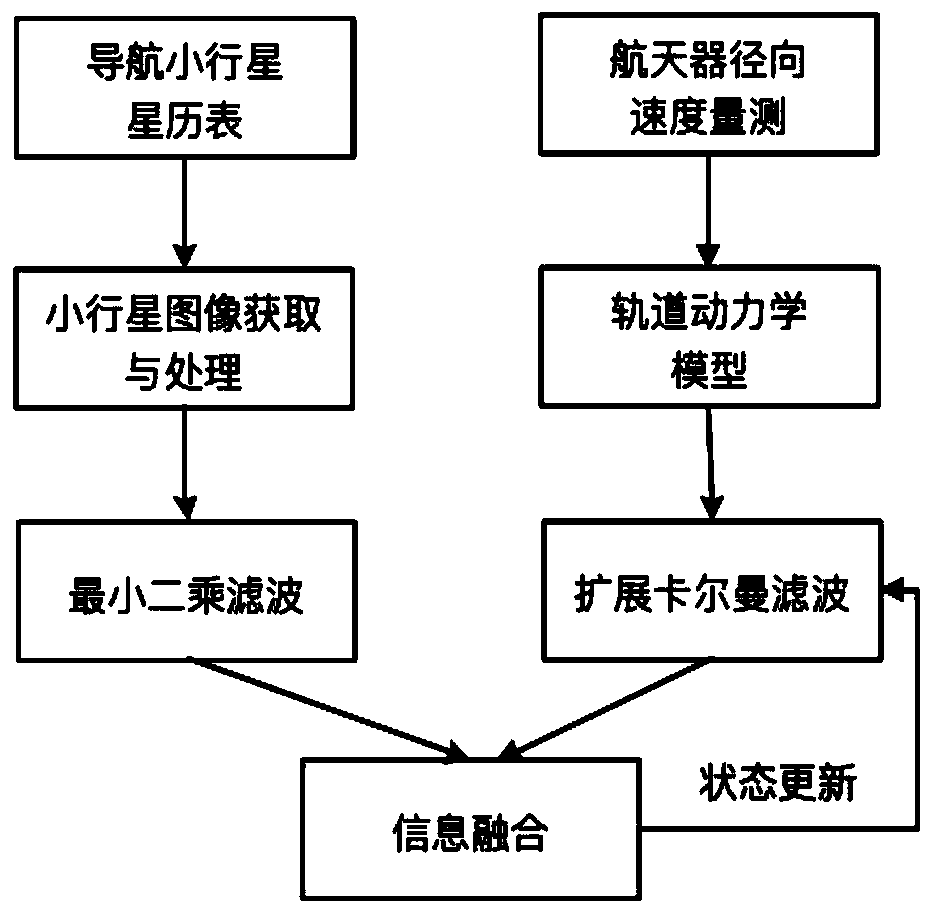
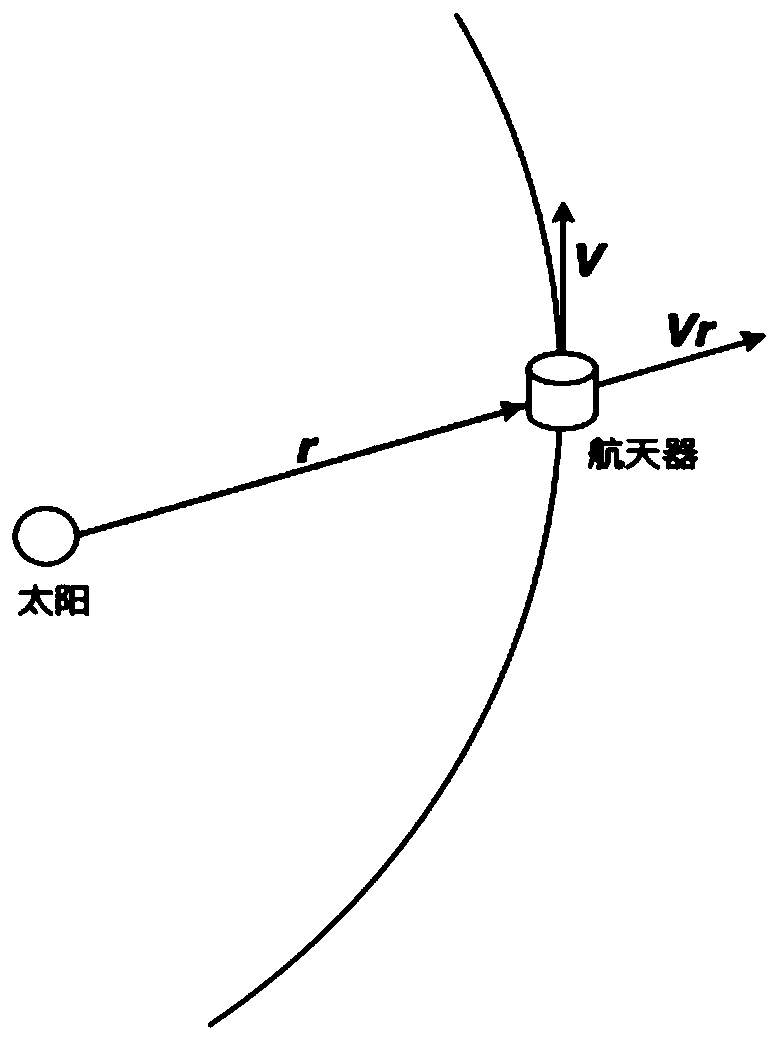
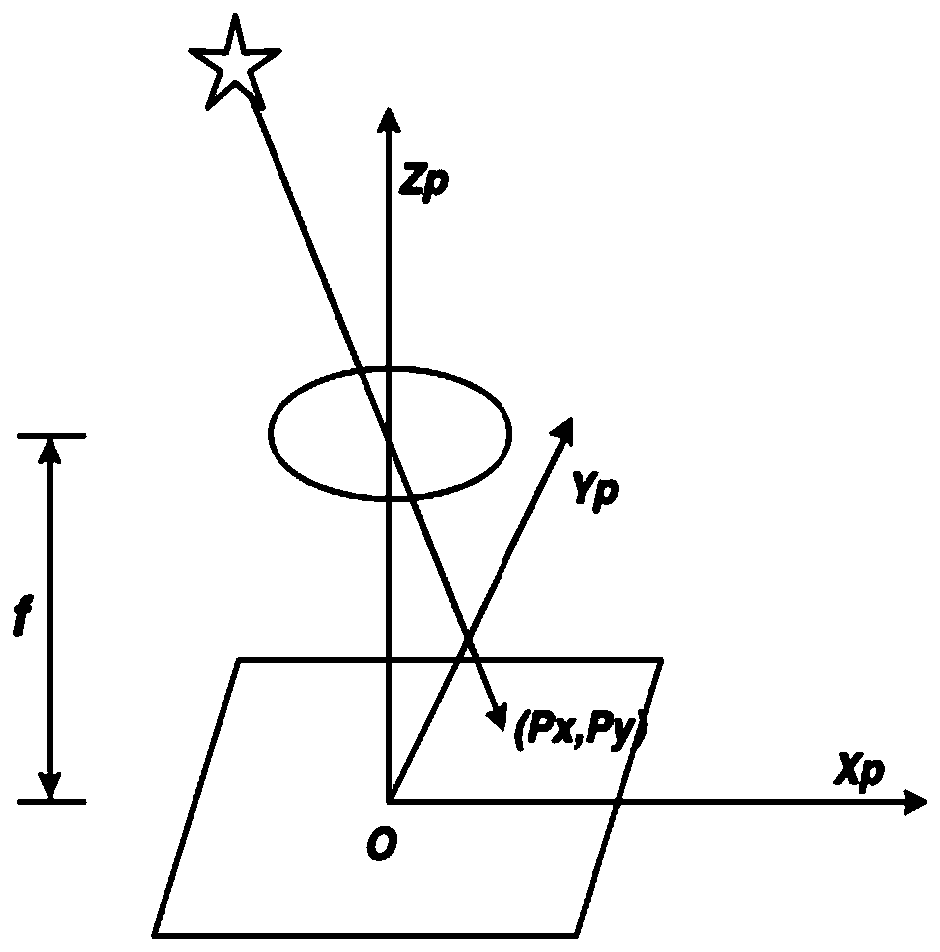
[0033] The invention first uses a spectrometer to measure the sun's Doppler frequency shift velocity, and simultaneously combines a dynamic model and an extended Kalman filter to pre-estimate the state of the spacecraft. Due to the large number of asteroids between Mars and Jupiter during the cruising period, the distance between Mars and Jupiter is relatively close, and the observability for determining the position of the spacecraft is better, so the asteroid line-of-sight vector of the asteroid belt is selected to be measured. Since the least squares method does not require dynamic equations for determining the position of the spacecraft, the results are not affected by model dynamic errors, so the least squares method is used to estimate the state information of the spacecraft again. Finally, the fusion method proposed in this patent is used to fuse the two estimated information...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com