Knee joint exoskeleton based on rope variable-rigidity multifunctional driver and control method
A multi-functional, drive technology, applied in passive exercise equipment, sensors, sports accessories, etc., can solve the problems of high energy consumption, potential safety hazards, low energy efficiency, etc., to reduce energy consumption, buffer ground impact, and improve energy efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0068] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, so that the advantages and features of the present invention can be more easily understood by those skilled in the art, so as to define the protection scope of the present invention more clearly.
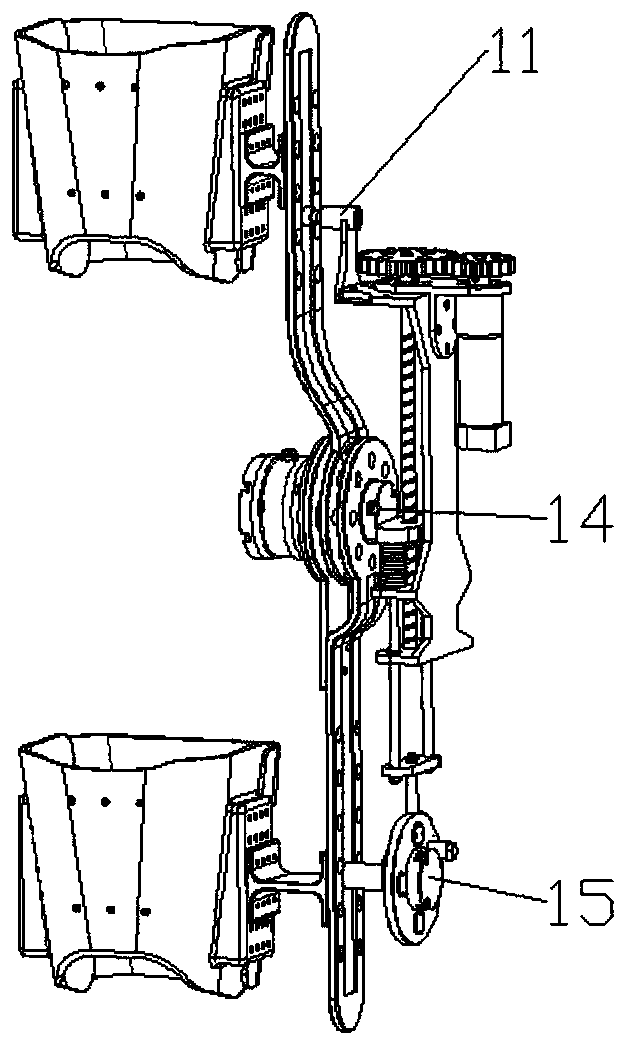
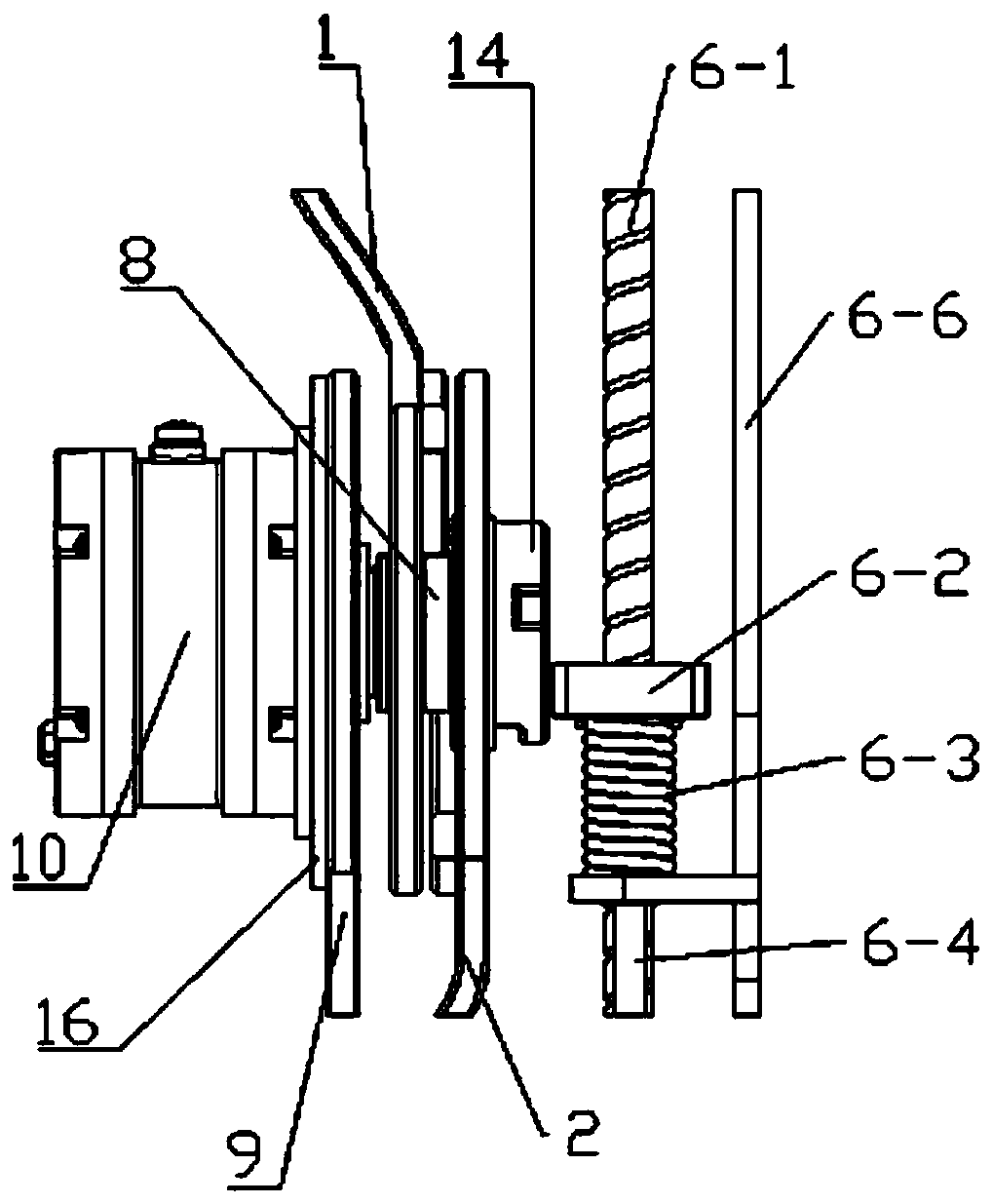
[0069] see figure 1 and figure 2 , a knee joint exoskeleton based on a rope variable stiffness multifunctional driver, including a leg structure, a multifunctional driver, a sensing and control system, and a waist control box.
[0070] Wherein, the leg structure includes a thigh bar 1 , a calf bar 2 , a knee joint rotation shaft 8 , a joint fixing plate 9 , a thigh strap 3 and a calf strap 4 . Such as Figure 4 As shown, the thigh bar 1 is composed of a thigh bar disc 1-5 and a thigh bar radial plate 1-4 at the top of the thigh bar disc 1-5, and the thigh bar disc 1-5 and The radial plates 1-4 of the thigh bar are integrally formed. The cent...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com