High-precision Collimator stepping motor control method capable of rapidly eliminating jitter
A technology of stepping motors and control methods, applied in the direction of motor generator control, control systems, electrical components, etc., can solve problems such as inability to achieve high-speed tracking focus, jitter, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be described in further detail below in conjunction with the embodiments.
[0046] This embodiment proposes a high-precision Collimator stepper motor control method with fast anti-shake, including the following steps:
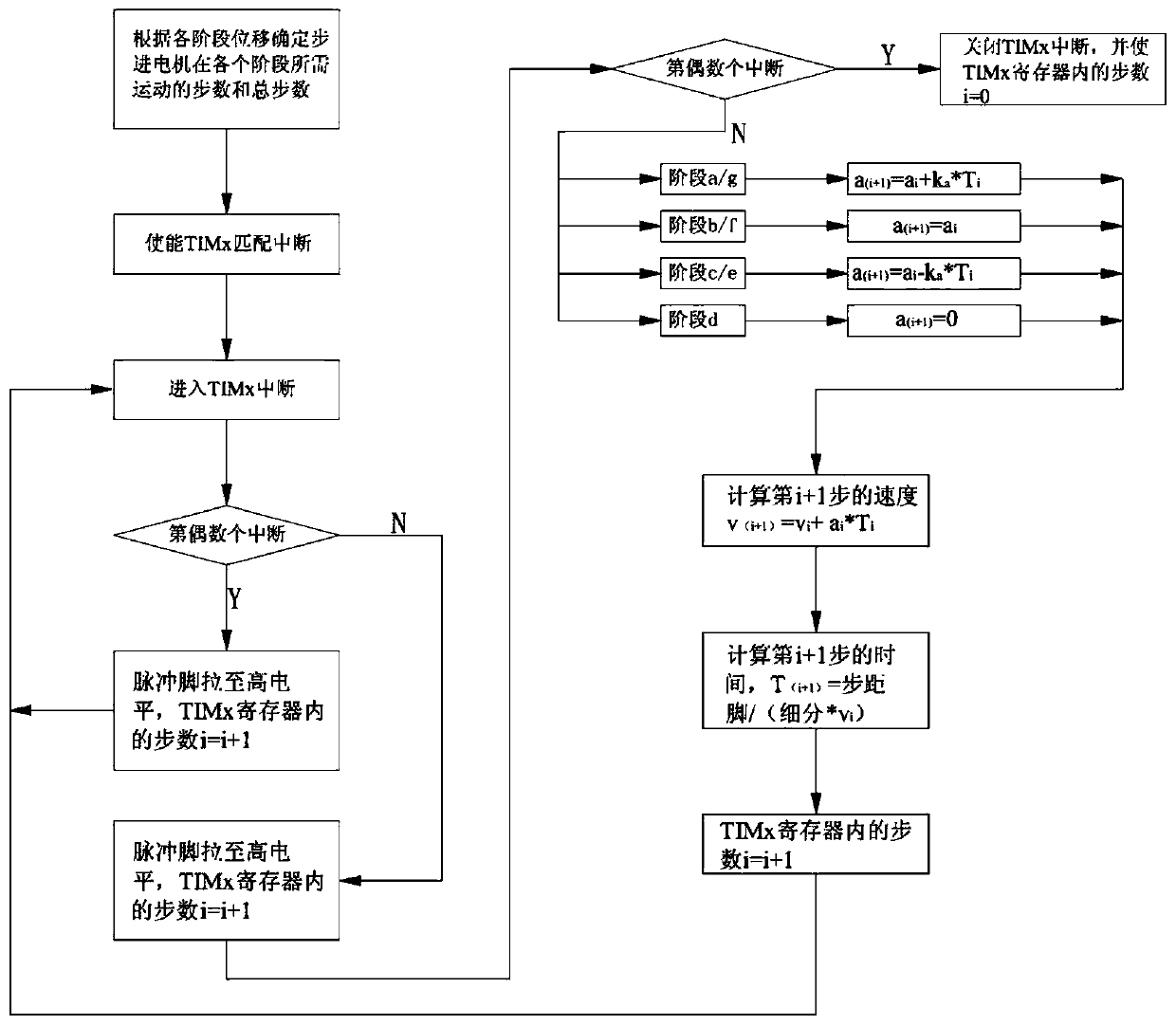
[0047] S10: The CPU receives and analyzes the motion instructions sent by the upper computer, and obtains initial parameters, including the acceleration coefficient k a , target acceleration a m , target speed v m , startup speed v s , stop speed v e , start acceleration a s and stop acceleration a e , after the above parameters are determined, a unique S-shaped curve can be determined, and the starting speed of the stepper motor v s , stop speed v e , start acceleration a s and stop acceleration a e All are 0, so it is not necessary to calculate during control;
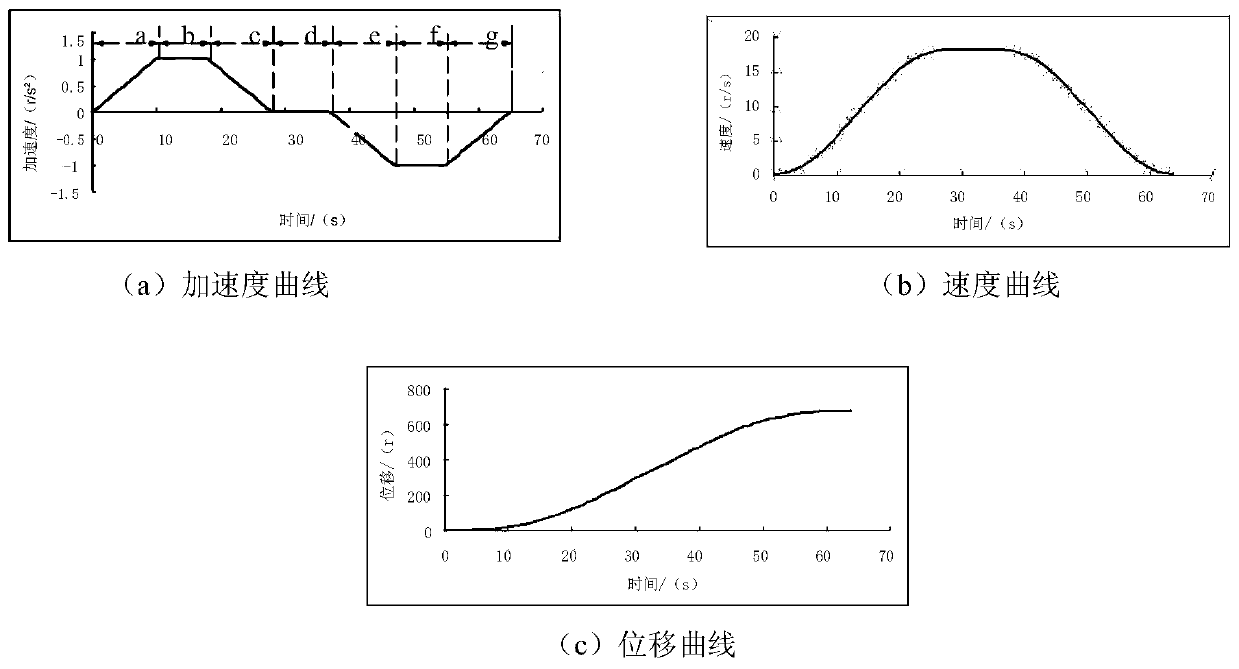
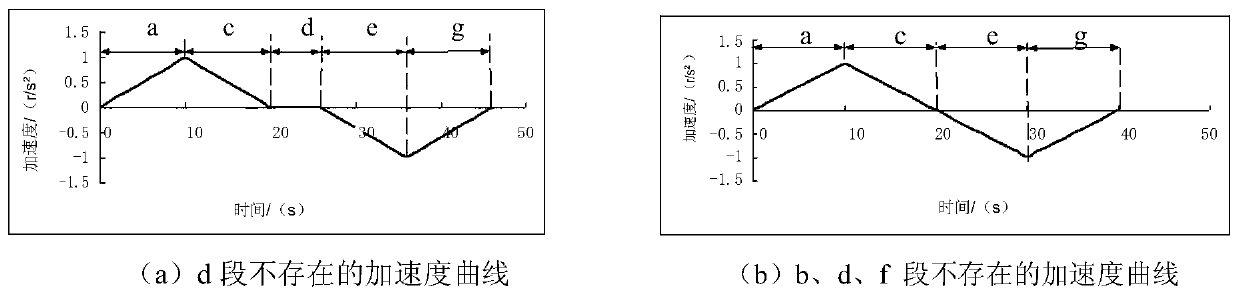
[0048] S20: Divide the displacement of the stepping motor into seven stages: acceleration section a, uniform acceleration section b, deceleration and accele...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com