UAV control method for automatically following signal source
A technology of automatic follow and control method, which is applied in the direction of finding the target control, etc., and can solve the problems of radio direction finding and guidance and tracking technology UAV fusion.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0068] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
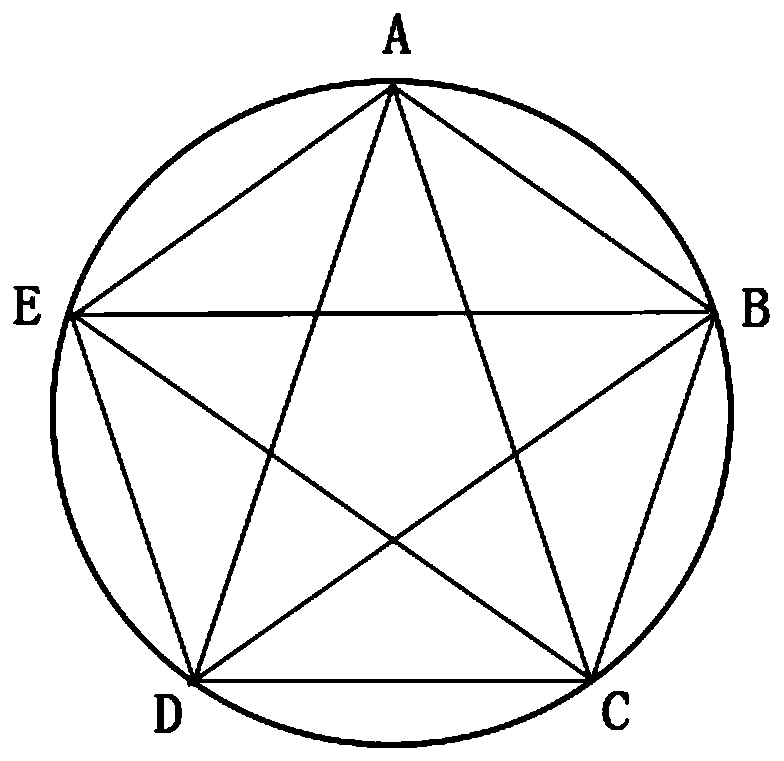
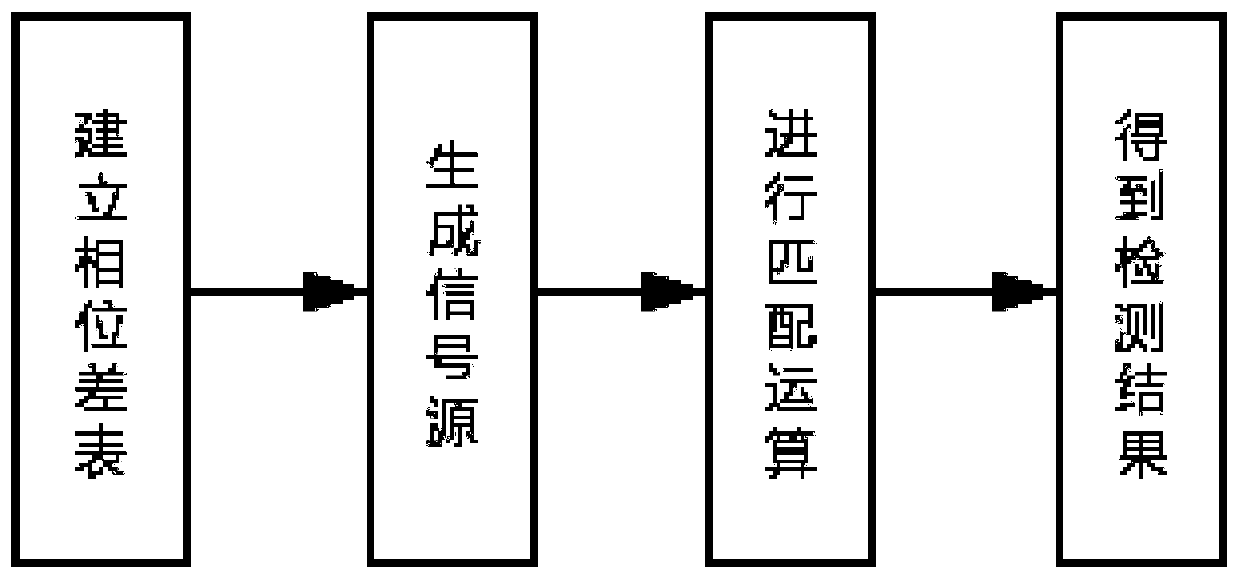
[0069] The present invention uses the relative interferometry in the radio direction finding technology, uses the phase difference measurement algorithm based on the cross-spectral density function to find the direction of the signal source, uses the structure of the five-element antenna array to establish a sample library of the phase difference, and attaches its corresponding pitch angle and azimuth to reduce direction finding time. In the actual situation, data matching is performed on the measured phase difference to obtain the real pitch angle and azimuth angle, so as to realize the positioning of the target.
[0070] The invention also combines the UAV path guidance algorithm. The algorithm takes the measured position of the person as the reference point, so that the UAV generates a horizontal acceleration, changes its own motion direction, moves...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Pitch angle | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com