Spiral photothermal drive film and soft-body crawling robot based on the same
A crawling robot, photothermal technology, applied in manipulators, program-controlled manipulators, coatings, etc., can solve problems such as low braking amplitude and slow response time of drives
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0019] Example 1: Spiral photothermal drive film
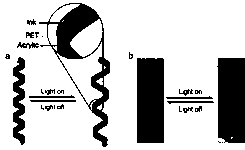
[0020] First, to prepare a photothermal actuation film with a three-layer structure, dissolve carbon black (5%) and polyurethane (30%) in a mixed solvent of ethyl acetate and acetone (20% / 80%), stir well, and heat at 3000r / min spin-coated on a pet film with a thickness of 1.6 μm, and after natural drying, an ink layer with a thickness of 1.2 μm was formed. Similarly, a water-based acrylic adhesive was spin-coated on the other side of the pet to form an acrylic layer. This example The thickness of the middle acrylic layer is 2 μm to form IPAT-2. In order to study its performance, IPAT-0 without acrylic layer is used as a control.
[0021] Secondly, take a photothermal actuation film with a size of 5cm×2mm, wrap one side of the ink layer on a steel rod at a helix angle of ±45°, fix the two ends of the film with polyimide tape, and then anneal in an oven at 120°C 4 hours to form a helical coil driving film, in order to study th...
Embodiment 2
[0022] Embodiment two: soft crawling robot
[0023] Cover 10 layers of highly oriented carbon nanotube arrays on a photothermal film with a size of 7 mm × 2 mm, wrap the side of the film facing away from the carbon nanotube film on a stainless steel rod with a diameter of 4 mm, and anneal at 100 ° C for 1 hour. Forming a soft-bodied crawling robot with a bow-shaped structure, when using 30 mW cm -2 When white light irradiates the front legs of the driver, the front legs will shrink and deform. With the help of the bow-shaped structure torque, it will drive back and shrink forward. Figure 8 As shown, turning on and off the white light sequentially at a frequency of 0.4Hz can drive the crawling robot at an average speed of 26mms -1 Moving forward, this is the current reported rGO-CNT / PDMS tracked robot record value of 16mms -1 1.6 times.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com