Boundary robust adaptive control method and device for marine flexible riser
A robust self-adaptive, flexible riser technology, applied in the direction of self-adaptive control, general control system, control/regulation system, etc., can solve the problems of system performance deterioration and affecting the control performance of flexible riser
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
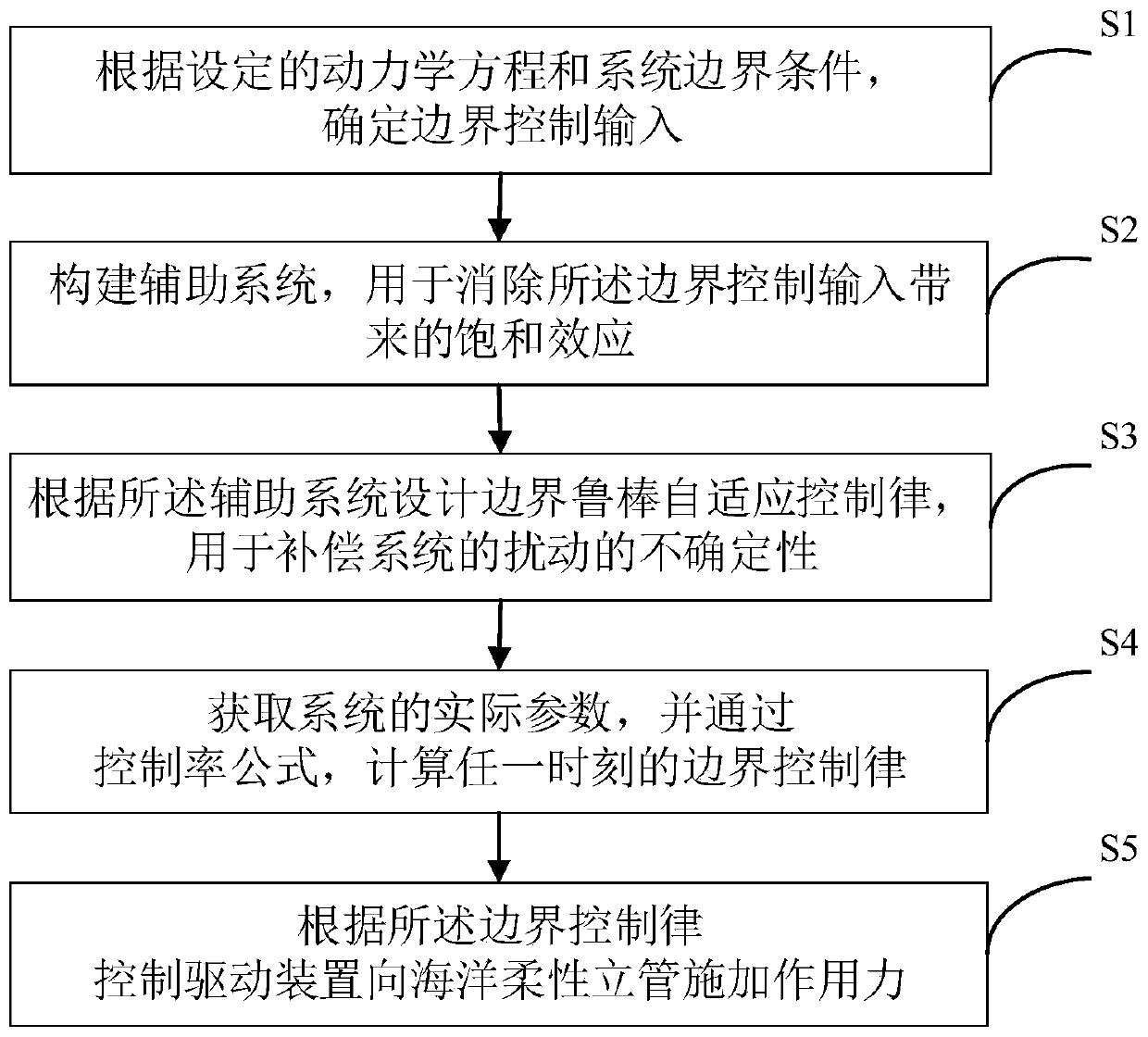
[0096] see figure 1 , a boundary robust adaptive control method for marine flexible risers provided in this embodiment can be executed by a relevant server, and the following descriptions will take the server as an execution subject as an example.
[0097] The boundary robust adaptive control method for marine flexible risers includes at least the following steps S1-S5.
[0098] S1. Determine the boundary control input according to the set dynamic equation and system boundary conditions.
[0099] In a specific embodiment, the kinetic equation is
[0100]
[0101] boundary conditions, for
[0102]
[0103] x(0,t)=x'(0,t)=x"(l,t)=0.
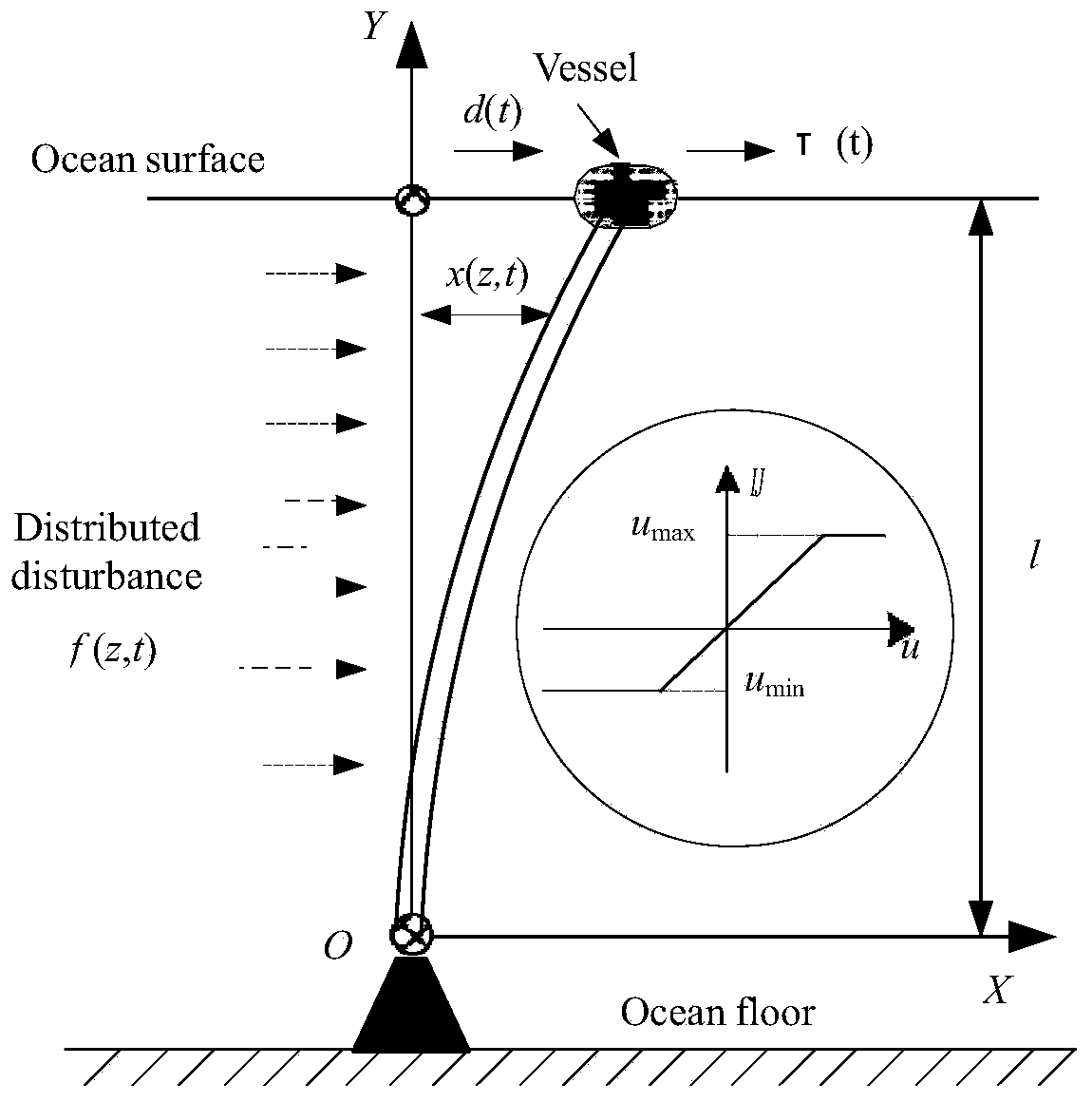
[0104] where z and t represent independent space and time variables, x(z, t) is the vibration displacement of the riser at z at time t, l, ρ, T, EI, and c are the length and mass per unit length of the riser, respectively , tension, bending stiffness, damping coefficient, m, d a are the mass and damping coefficient of the ship, d(t) is t...
no. 2 example
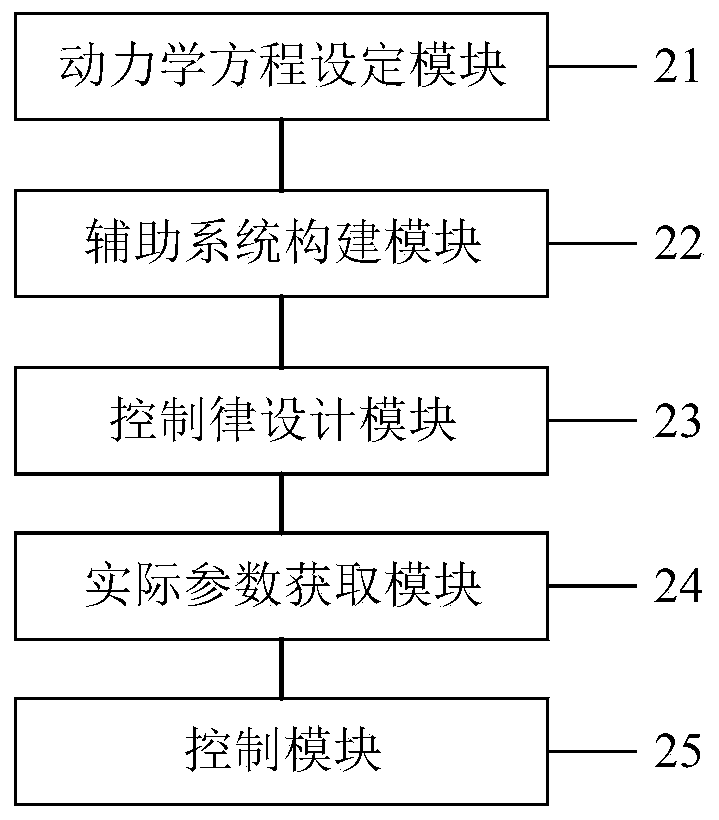
[0151] see figure 2 . This embodiment also proposes a device for boundary robust adaptive control of marine flexible risers, including: a dynamic equation setting module 21, which is used to determine the boundary control according to the set dynamic equation and system boundary conditions Input; Auxiliary system construction module 22 is used to construct an auxiliary system to eliminate the saturation effect brought by the boundary control input; Control law design module 23 is used to design a boundary robust adaptive control law according to the auxiliary system to compensate the system The uncertainty of the disturbance; the actual parameter acquisition module 24 is used to acquire the actual parameters of the system, and calculates the boundary control law at any moment through the control law formula; the control module 25 controls the driving device to The marine flexible riser system exerts force.
[0152] In a specific embodiment, the dynamic equation setting modu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com