Underwater sensor network routing method based on multiple underwater autonomous vehicles
An autonomous vehicle and underwater sensor technology, which is applied to services, data exchange networks, and transmission systems based on specific environments, and can solve information redundancy, data packet transmission delays, and nodes that cannot find the next hop forwarding node. and other problems, to achieve the effect of improving network transmission performance, reducing energy consumption, and avoiding data packet conflicts.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0044] Such as Figure 4 As shown, the underwater sensor network routing method based on multiple underwater autonomous vehicles provided by the present invention includes the following steps carried out in order:
[0045] Step 1. Network initialization phase:
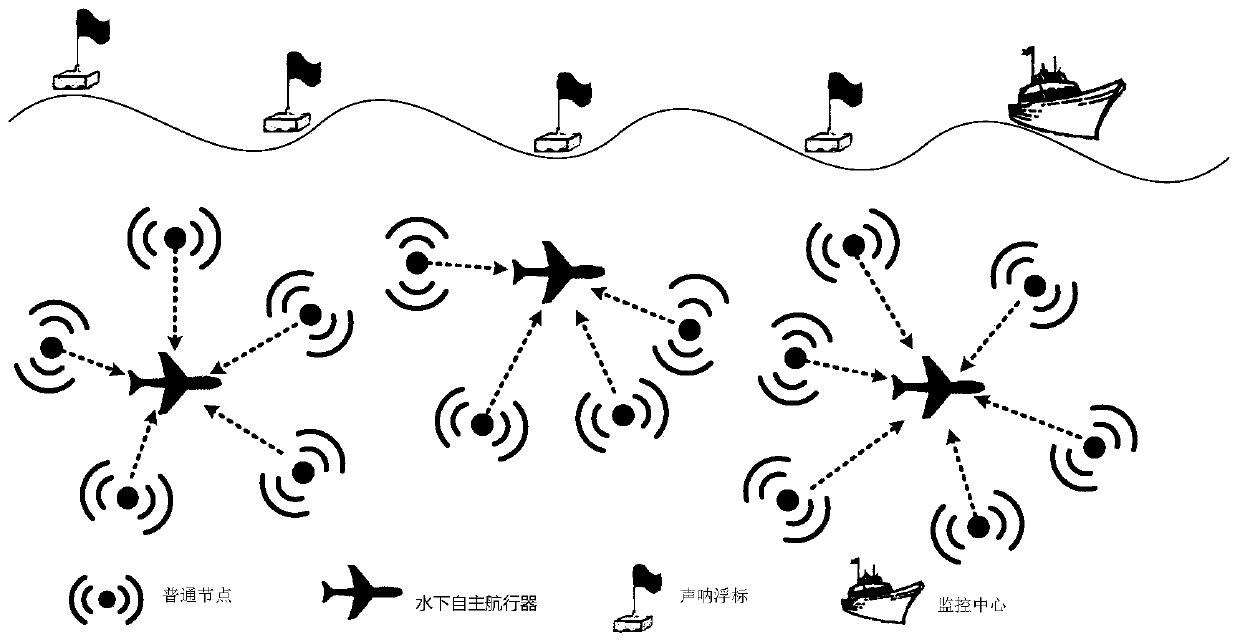
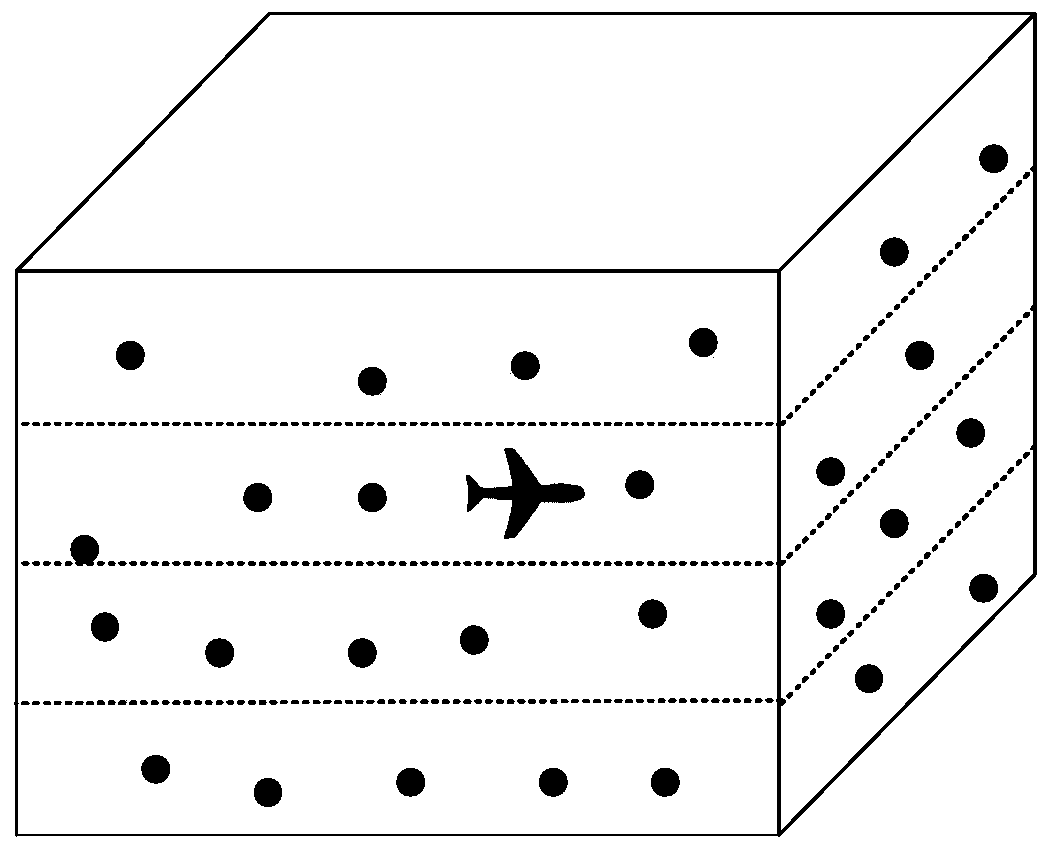
[0046] Step 1.1: Build as figure 1 The underwater sensor network model based on multiple underwater autonomous vehicles is shown, each underwater autonomous vehicle is used as a converging node, and the layered distance threshold D is set, the information collected by the underwater autonomous vehicles is expressed as a data packet The form broadcasts to each common underwater sensor node, and the broadcast information includes the transmission power of the underwater autonomous vehicle;
[0047] Step 1.2: After receiving the broadcast information, each common underwater sensor nod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com