Desktop upper-limb rehabilitation robot and using method thereof
A rehabilitation robot and desktop technology, applied in the field of rehabilitation robots, can solve the problems of lack of rehabilitation evaluation data, complex mechanical structure, inconvenient use, etc., and achieve the effects of low price, increased interest, and wide application range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
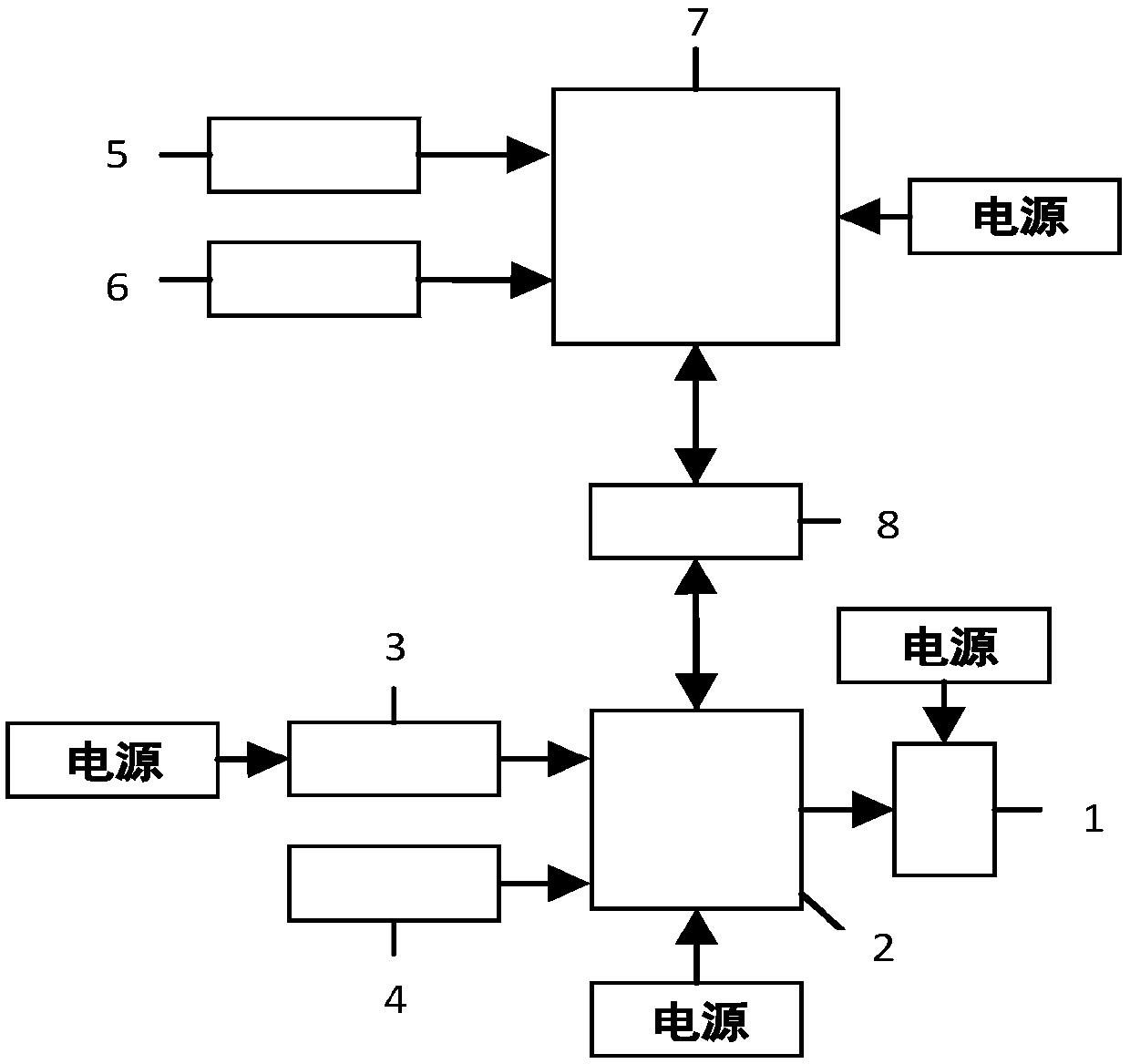
[0061] A desktop upper limb rehabilitation robot (as attached figure 1 shown), consists of a stand, omnidirectional wheels and drive system 1, lower computer control system 2, contact force detection system 3, position detection system 4, myoelectric measurement system 5, EEG measurement system 6 and upper computer control system 7 , the bluetooth system 8 and the power supply are connected by electrical signals.
[0062] The lower computer control system 2 adopts the STM32 system, communicates with the upper computer control system 7 through the Bluetooth system 8, receives the control mode instructions sent by the upper computer control system 7, and completes the control instructions of the omnidirectional wheel and the drive system 1 to generate corresponding Motor drive command, and contact force detection system 3 functions of contact force control.
[0063] The contact force detection system 3 is a three-dimensional force sensor for collecting patient force informatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com