Life detecting system and method based on multi-rotor UAV
A multi-rotor UAV and life detection technology, applied in the field of life detection and rescue, can solve the problems of phase error, search and rescue range, limited flexibility, inability to accurately detect weak signals, etc., to achieve fast search, maintain real-time, The effect of eliminating distractions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described below in conjunction with the accompanying drawings and specific preferred embodiments, but the protection scope of the present invention is not limited thereby.
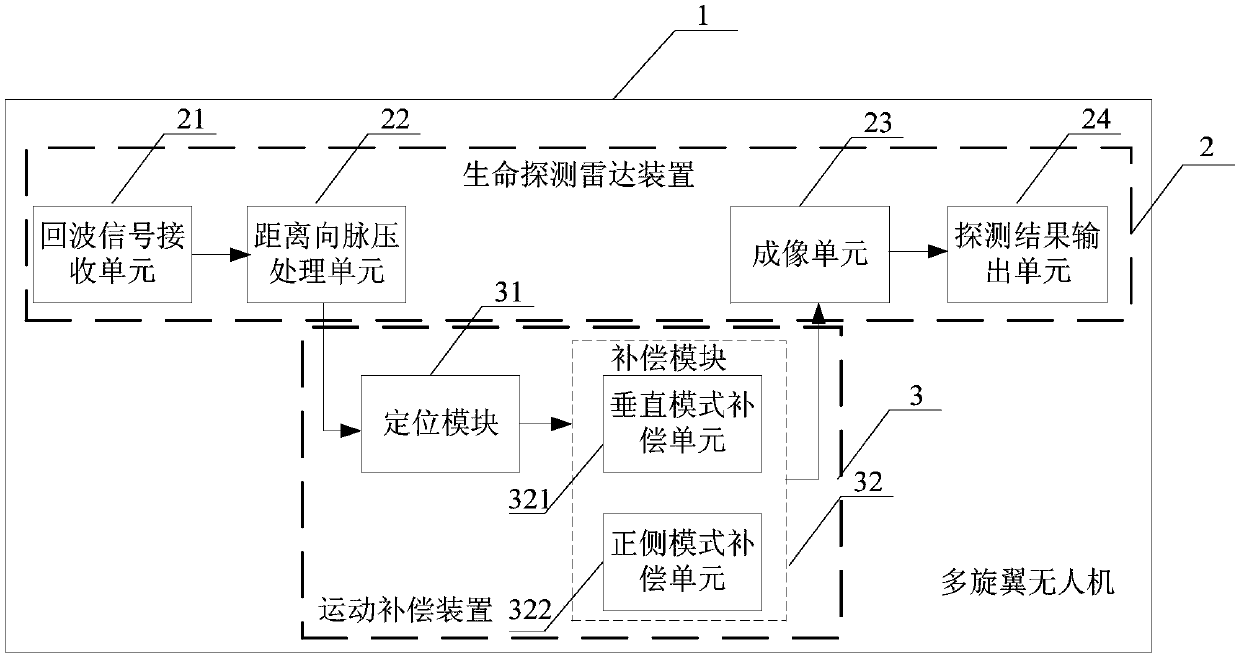
[0044] Such as figure 1 As shown, the life detection system based on the multi-rotor UAV in this embodiment includes the multi-rotor UAV 1 and the life detection radar device 2 mounted on the multi-rotor UAV 1, and also includes the life detection radar device 2 connected to the multi-rotor UAV. The motion compensation device 3, when the multi-rotor UAV 1 is flying in the area to be measured, the life detection radar device 2 detects the living body target, and during the detection process of the life detection radar device 2, the motion compensation device 3 uses the multi-rotor unmanned The real-time position information of the UAV 1 performs motion compensation on the radar detection signal of the life detection radar device 2, so as to compensate the displac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com