Three-dimensional object detection method based on view cone point cloud
A technology of three-dimensional objects and detection methods, which is used in three-dimensional object recognition, neural learning methods, biological neural network models, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the drawings in the embodiments of the present invention.
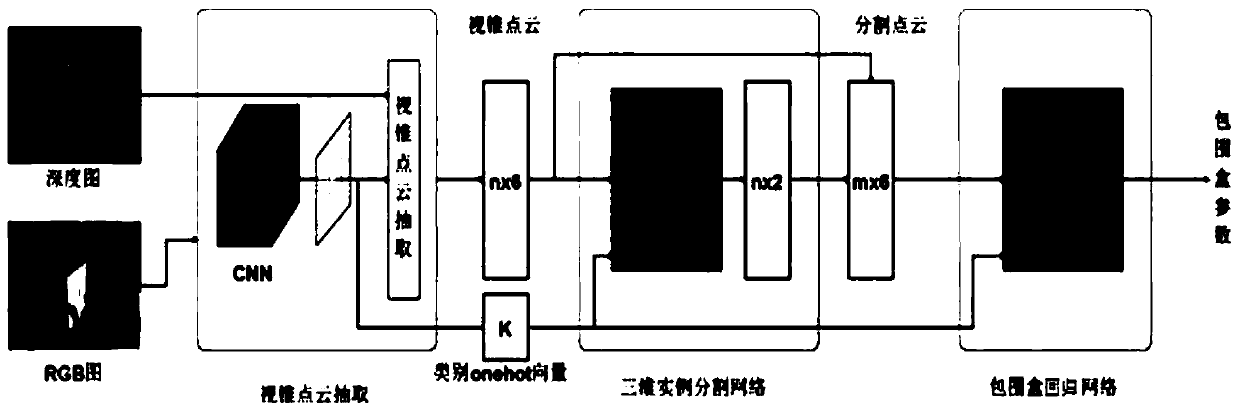
[0048] In the present invention, an RGB image refers to an image represented by red (R), green (G), and blue (B) parameter values, and it passes three colors of red (R), green (G), and blue (B) Variation of the channels and their superposition on each other to get a wide variety of colors; a depth map is an image or image channel that contains information about the distance to the surface of the scene object from the viewpoint, which is similar to a grayscale image, but a depth map Each pixel value of is the actual distance from the sensor to the object. Usually the RGB image and the Depth image are registered, so there is a one-to-one correspondence between the pixels. The point cloud image refers to the image obtained after the RGB image and the Depth image are aligned and r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com