


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Inshore vessel detection method based on contour refinement and improved generalized Hough transform
A generalized Hough transform, ship detection technology, applied in image data processing, instrumentation, computing and other directions, can solve the problems of low ship detection accuracy, relying on a large number of training samples, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
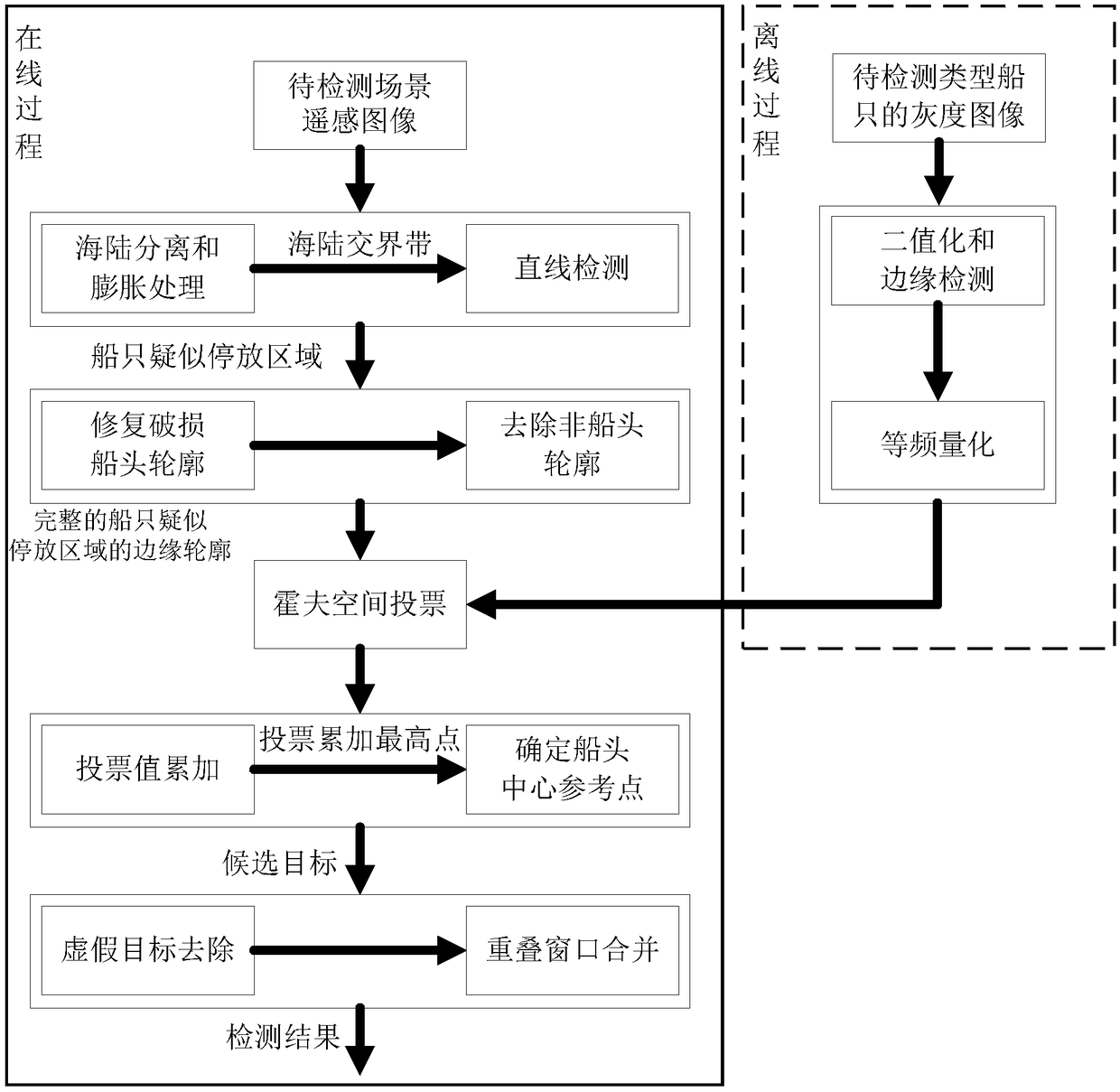
[0029] Specific implementation mode one: combine figure 1 with figure 2 To illustrate this embodiment, the specific process of a detection method for nearshore vessels based on outline refinement and improved generalized Hough transform in this embodiment is as follows:
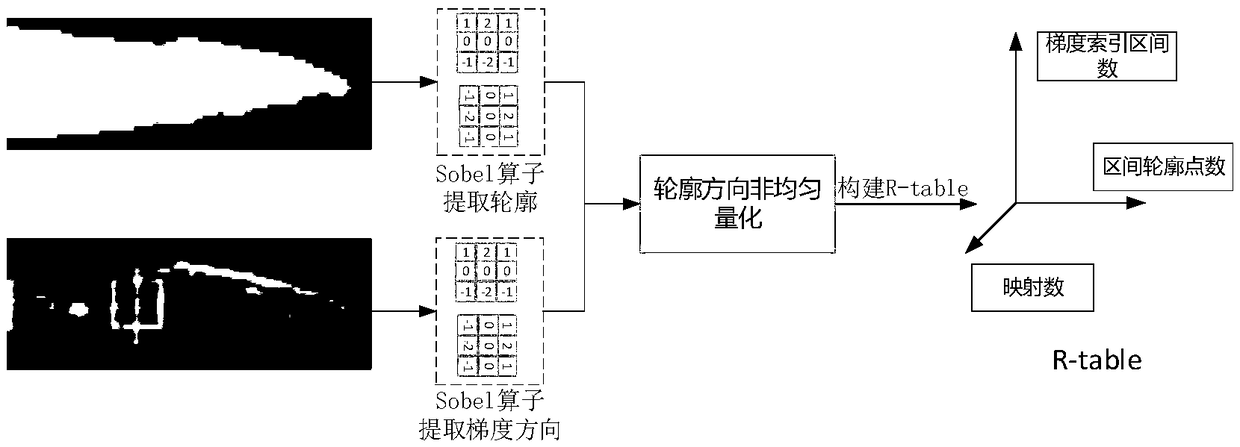
[0030] Step 1, according to the type of ship to be detected, input the grayscale image of the type of ship to be detected, utilize the Sobel operator to perform edge detection, obtain the length and width information of the type of ship to be detected and the binarized edge detection result image of the ship; Using the image of the binarized edge detection result of the ship, a Hough space voting gradient angle reference table is established;
[0031] Step 2. Perform equal-frequency quantization on the Hough space voting gradient angle reference table established in step 1 to obtain the equal-frequency quantization Hough space voting gradient angle reference table; the process of step 1 and step 2 is an off...
specific Embodiment approach 2
[0044] Specific implementation mode two: combination figure 2 with image 3 Describe this embodiment. This embodiment will further explain the detection method of near-shore vessels based on outline refinement and improved generalized Hough transform described in the first embodiment. The specific method is:
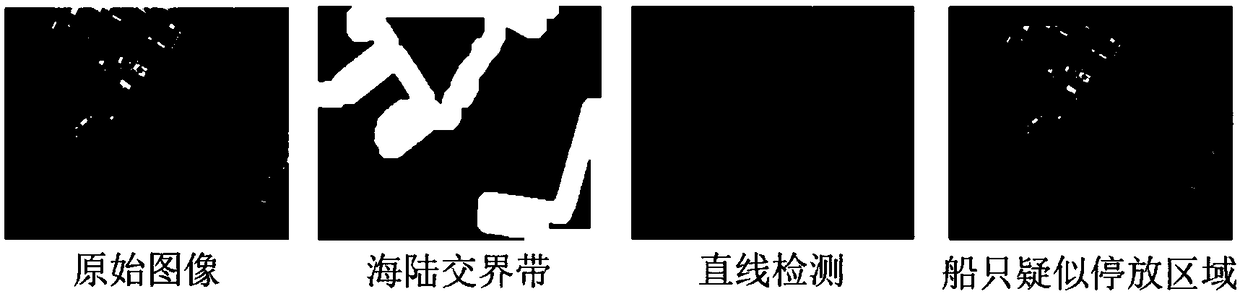
[0045] Step 31. Using the region growing algorithm to separate the ocean and land from the remote sensing image of the scene to be detected, respectively performing expansion processing on the separated ocean and land, and taking the junction zone between the ocean and land as the sea-land junction zone;
[0046] Step 32: Use the line segment detection algorithm to detect the straight line segment of the suspected ship body or wharf, take the neighborhood image of each straight line segment as the suspected parking sub-image, and obtain the suspected parking area of the ship near the coastline.
[0047] In this embodiment, since the near-shore ships are docked at th...
specific Embodiment approach 3
[0048] Specific implementation mode three: combination Figure 4 with Figure 5 Describe this embodiment. This embodiment will further explain the detection method of near-shore vessels based on outline refinement and improved generalized Hough transform described in the first embodiment. The specific method of edge contour is:
[0049] Step 41: Use the scanline-based shadow completion algorithm to complete the outline of the ship with the incomplete bow outline in the suspected parking area of the ship;
[0050] Step 42, using the curvature attribute of the contour point to remove the non-bow contour in the suspected parking area of the ship, and obtain the edge contour of the suspected parking area of the ship.
[0051] The contour completion of the bow adopts the shadow completion algorithm based on the scan line. Since the shadow of the ship structure will partially block the bow, resulting in the incomplete outline of the bow, the present invention uses the compu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com