Posture adjustment path planning method of intelligent forklift
A technology for path planning and posture adjustment, applied in the direction of lifting devices, etc., can solve the problems of large friction between the fork and the edge of the pallet hole, lack of flexibility, and posture deviation, etc., so as to achieve a simple planning process, avoid excessive wear, and reduce The effect of steering amplitude
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
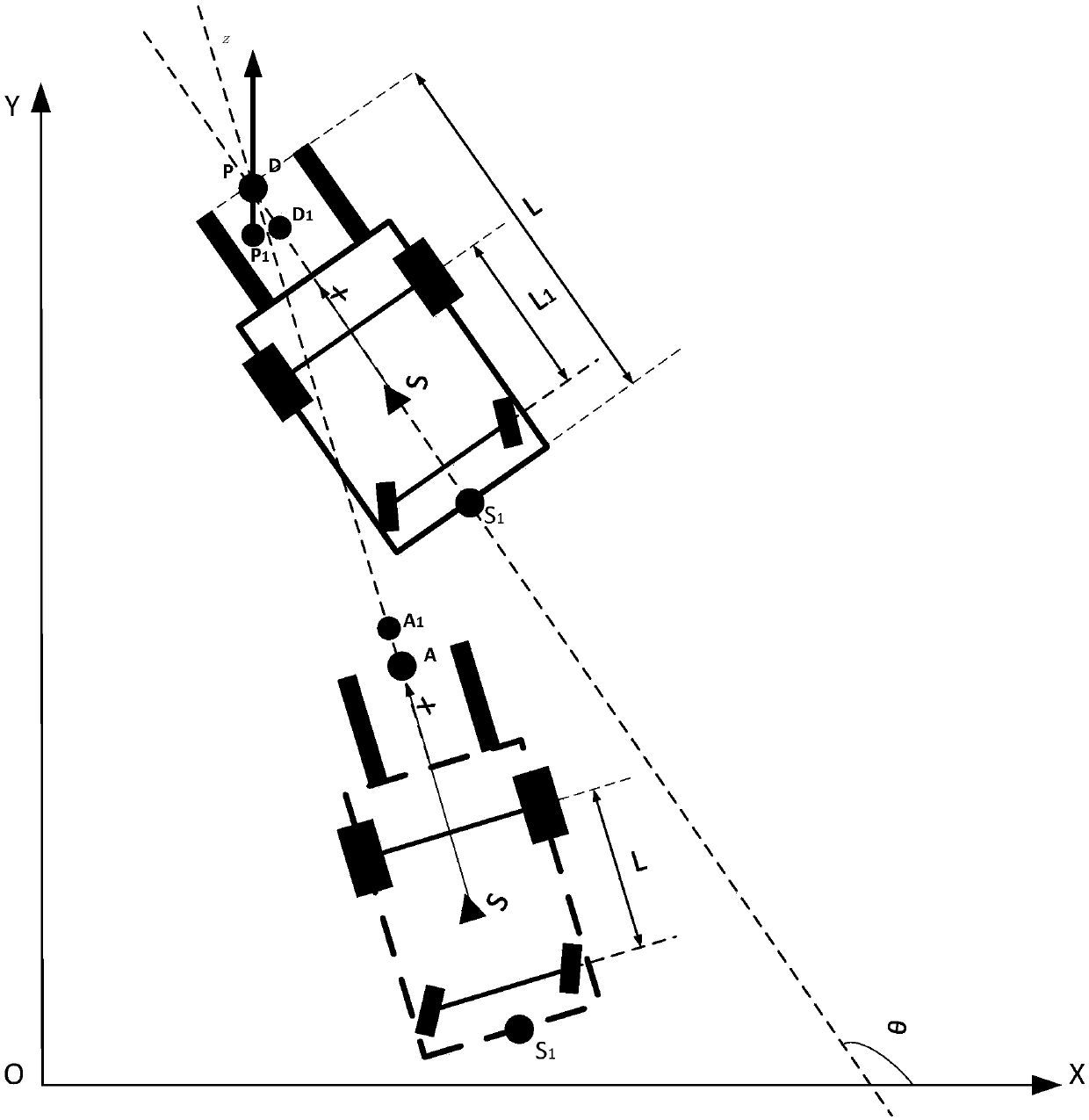
[0036] Such as figure 1 and figure 2 As shown, the present invention discloses a path planning method for posture adjustment of an intelligent forklift, and the method includes the following parts:
[0037] (1) Establish the global coordinate system of the environment; and use the midpoint between the outer tops of the left and right forks of the forklift as the current position of the forklift, and then judge whether the current pose of the forklift meets the requirements, and calculate the distance from the tail of the forklift to surrounding objects;
[0038] (2) According to the principle of autonomous driving to adjust the vehicle's posture under normal working conditions in life, the forklift posture adjustment is realized in two steps: backward and forward; each step selects appropriate control points and uses B-spline curves to Implement path planning.
[0039] Use the SICK-NAV350 navigation laser scanning sensor S to establish the Cartesian global coordinate system...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com