Two-wheel-driving type low-speed all-weather unmanned cruiser system
A technology for unmanned and patrol cars, applied in the direction of motor vehicles, control/regulation systems, non-electric variable control, etc. And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The present invention will be further described below in conjunction with accompanying drawing.
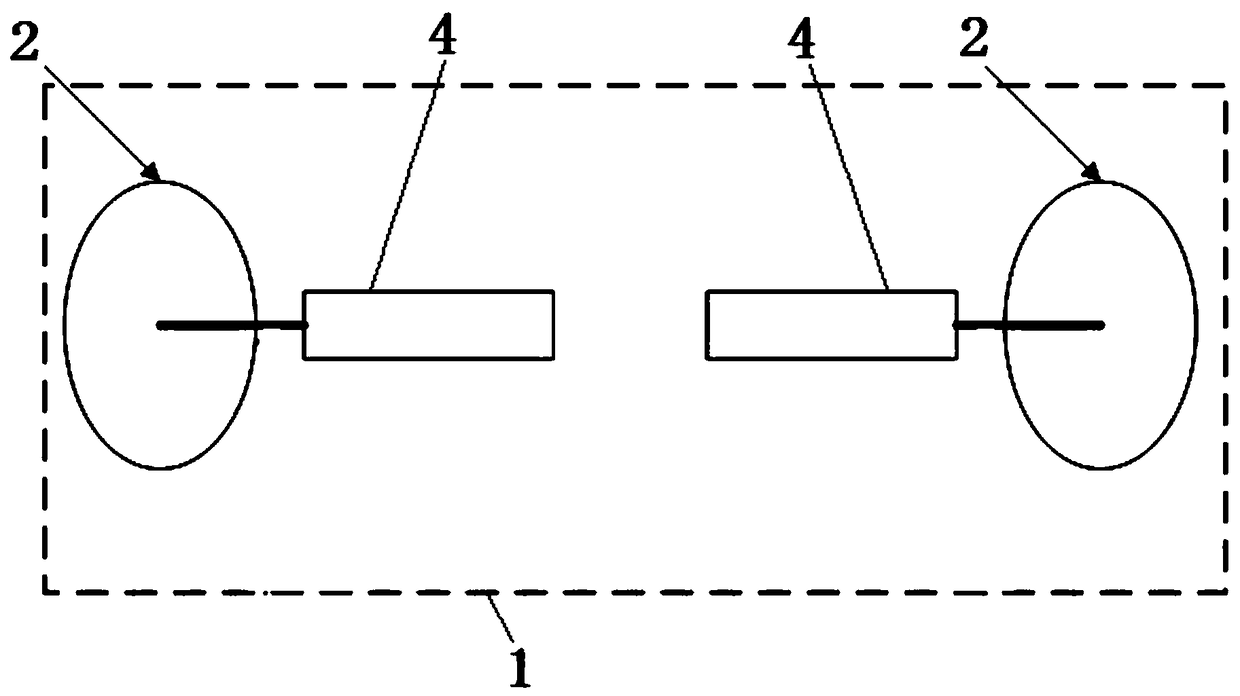
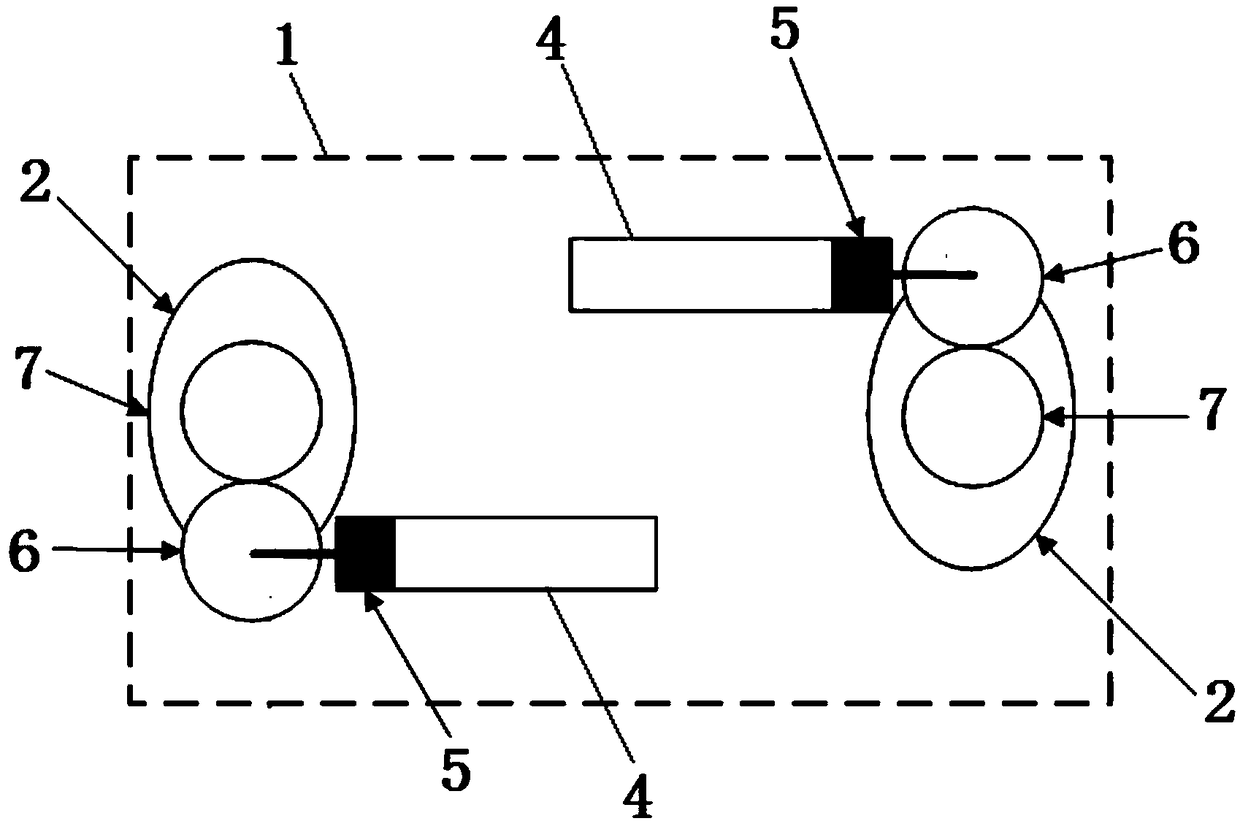
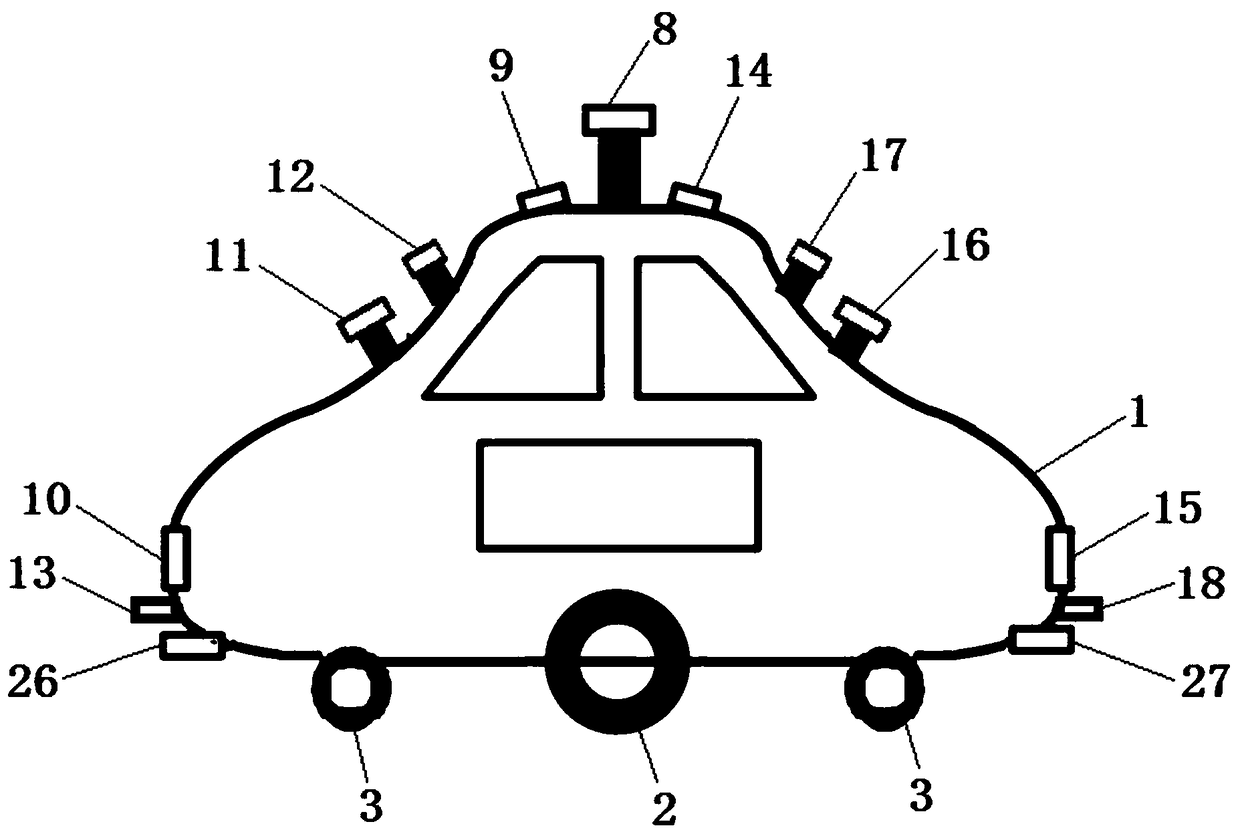
[0061] Such as Figure 1 to Figure 5 As shown, a two-wheel drive low-speed all-weather unmanned patrol car system includes a patrol car body 1 and a control system arranged on the patrol car body 1; the lower part of the patrol car body 1 is equipped with a pair of driving A pair of driven wheels 3 are respectively assembled on the left and right parts of the wheel 2 in the length direction. As a kind of preference, each driven wheel 3 is a universal wheel. The inside of the patrol car body 1 is equipped with two DC motors 4 for respectively driving the two drive wheels 2; the inside of the patrol car body 1 is also provided with two planetary reducers 5 which are respectively located at the outside of the two DC motors 4 motor shafts, The planetary reducer 5 is a 90-degree angular planetary reducer; the length direction of the two DC motors 4 extends in the direction of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com