Processing method for millimeter-wave radar signals in adaptive cruise
A technology of millimeter-wave radar and adaptive cruise, applied in radio wave reflection/re-radiation, radio wave measurement system, utilization of re-radiation, etc., can solve problems such as adjusting radar signal processing methods, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
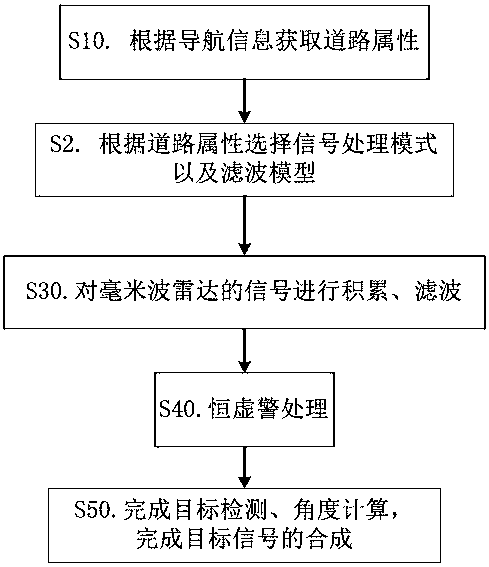
[0034] Such as figure 1 As shown, the processing method of the millimeter-wave radar signal in the adaptive cruise of the present invention is mainly used to acquire and process the millimeter-wave radar signal at the current moment of the target obstacle near the vehicle. The reception is easily affected by vehicle speed, road traffic conditions, etc. In order to eliminate the influence of the surrounding environment on the millimeter wave radar signal, it is necessary to adjust the signal processing method for various environments. This embodiment provides automatic identification of road attributes according to the geographical location of the vehicle The millimeter-wave radar signal processing method is as follows:
[0035] S10. Obtain the road attribute of the road where the current vehicle is located according to the navigation information. The road attribute refers to the type of road. The road attribute can be but not limited to one of expressways, ordinary roads, and ...
Embodiment 2
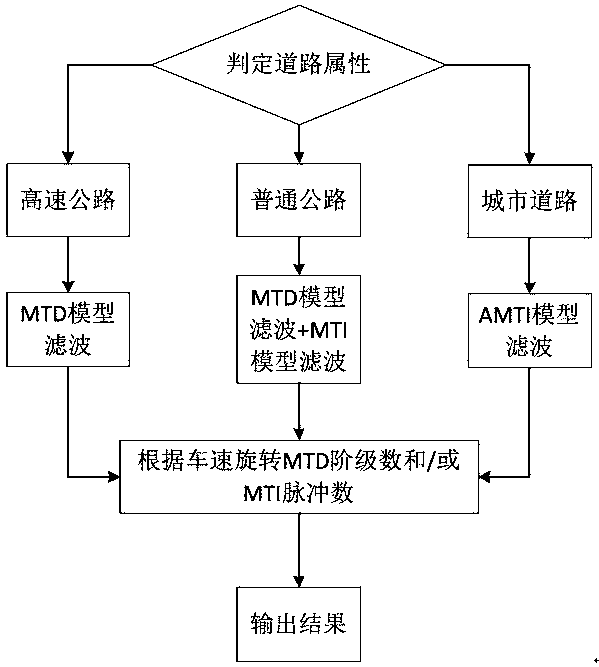
[0047] The difference between this embodiment and Embodiment 1 is that the moving target detection in this embodiment has multiple levels of stages, and the stages are negatively correlated with the speed of the vehicle. That is, the higher the speed of the vehicle, the lower the number of stages of moving object detection, and the number of stages of moving object detection in this embodiment is 3. When the speed of the vehicle is high, select the low order number, and vice versa, select the high order number.
[0048] In addition, the moving target display also has multiple levels of pulse numbers, which are positively correlated with the complexity of the road state. The more complex the road state, the higher the noise, so a higher number of pulses is required to control the noise. In this embodiment, the number of levels of pulses displayed by the moving object is two. On urban roads, high pulse counts are usually used for filtering.
Embodiment 3
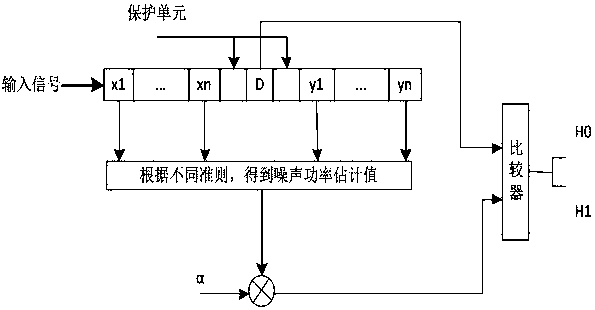
[0050] The difference between this embodiment and embodiment 1 is: as figure 2 shown. The constant false alarm processing in the present embodiment comprises the following sub-steps: as image 3 as shown,
[0051] S41. Select a criterion according to the road attribute of the current vehicle location, for example, select a mean value criterion, an ordered statistical criterion or an automatic screening criterion according to the complexity of the environment from high to low. The estimated value of the noise power is calculated according to the obtained signal context; in this embodiment, a protection unit signal is provided between two adjacent radar signals for separating and identifying radar signal data.
[0052]S42. Selecting a distance parameter α according to the distance, α decreases as the distance increases, and performs tensor product calculation with the noise power estimated value to obtain the constant false alarm threshold;
[0053] S43. Comparing the consta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com