Soft tissue deformation modeling method based on virtual springs
A modeling method and soft tissue technology, which is applied in the field of virtual reality human-computer interaction, can solve problems such as poor stability and poor performance of soft tissue biomechanical properties, and achieve the effect of small calculation, realistic simulation effect and satisfaction of authenticity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
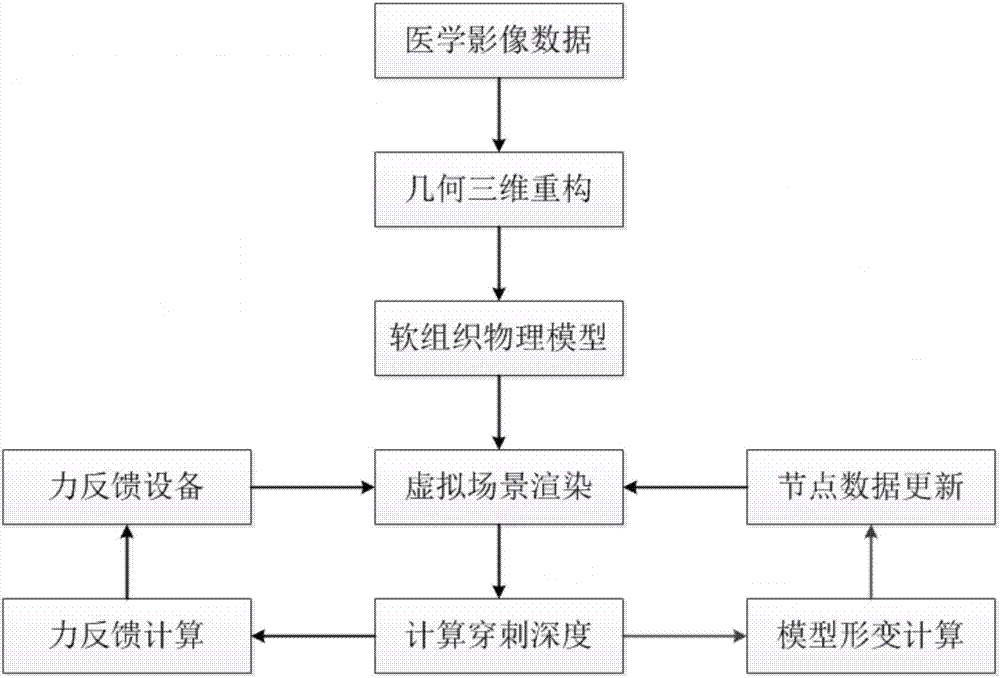
[0056] figure 1 It is a flow chart of the virtual spring-based soft tissue deformation modeling method of the present invention.
[0057] A complete virtual flexible body force tactile feedback simulation system includes a host computer and a haptic interaction device. A display is connected to the host computer, and the computer is linked with the haptic interaction device to transmit the deformation information of the soft tissue surface generated by the calculation deformation module to the Force-tactile interactive devices. The tactile interaction device used in the example is the PHANTOM device of SensAble Technology Company, which can accurately track the three-dimensional movement of the human hand, and feed back the virtual force calculated by the virtual model to the operator in real time, providing a realistic sense of immersion in force. The maximum output feedback force of PHANTOM equipment is 3.3N.
[0058] This example starts from medical image data, builds and...
example
[0100]The deformation simulation of the soft tissue real-time force feedback interactive system generally requires relatively high real-time performance, so it has high requirements for the calculation speed and refresh frequency of the system. The continuity of vision and force sense reproduction is required. The refresh rate of soft tissue deformation in visual display should not be less than 30Hz, and the refresh rate of force sense reproduction should be above 1kHz in order to achieve the rapidity required by force feedback.
[0101] When the deformation rate ε of the contact point 1 When different values are taken, different deformation curves are obtained. And, under the action of the same force, the deformation rate ε of different tissues 1 Different, the deformation of soft tissue is also different. ε 1 The larger the value, the softer the soft tissue and the greater the force deformation. At the same time, the softness of the soft tissue is also related to the e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com