Piezoelectric-driven two-degrees-of-freedom decoupling slight swing platform
A piezoelectric drive, degree of freedom technology, applied in the field of micro-positioning, can solve the problems of high assembly precision, influence of platform motion precision, increase of platform processing cost, etc., to reduce control difficulty, improve static and dynamic characteristics, and compact structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0016] In order to further understand the invention content, characteristics and effects of the present invention, the following examples are given, and detailed descriptions are as follows in conjunction with the accompanying drawings:
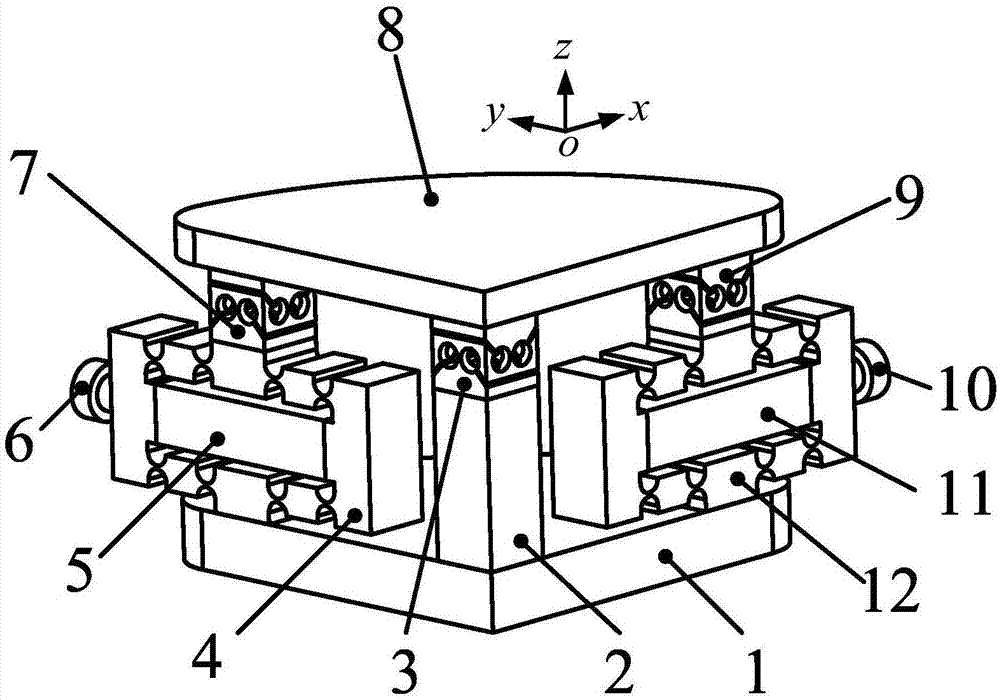
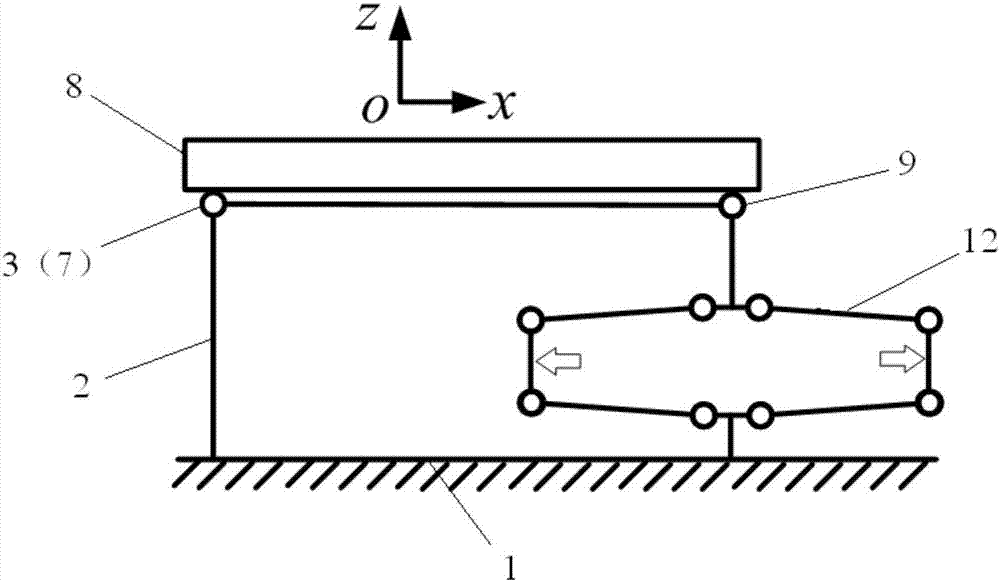
[0017] see Figure 1 ~ Figure 3 , the embodiment of the present invention protects a piezoelectric-driven two-degree-of-freedom decoupling micro-oscillating platform, including a base 1, a column 2, a decoupling Hooke hinge 3, an X-axis bridge-type amplification mechanism 12, and an X-axis piezoelectric ceramic driver 11. X-axis pre-tightening bolt 10, X-axis Hooke hinge 9, Y-axis bridge amplification mechanism 4, Y-axis piezoelectric ceramic driver 5, Y-axis pre-tightening bolt 6, Y-axis Hooke hinge 7, working platform 8.
[0018] In this embodiment, the base 1 is a triangular or fan-shaped flat plate, and the X-axis and Y-axis bridge-type amplification mechanisms 12 and 4 are installed on the outside of the two sides of the triangle or fan-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com