ROS based service robot and indoor navigation method thereof
A service robot and robot technology, applied in the field of service robots, can solve the problems of low autonomy, lack of ability to solve emergencies, lack of human-computer interaction functions, etc., to achieve strong adaptability, rich human-computer interaction functions, anti- The effect of strong interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Below in conjunction with accompanying drawing, further elaborate the present invention.
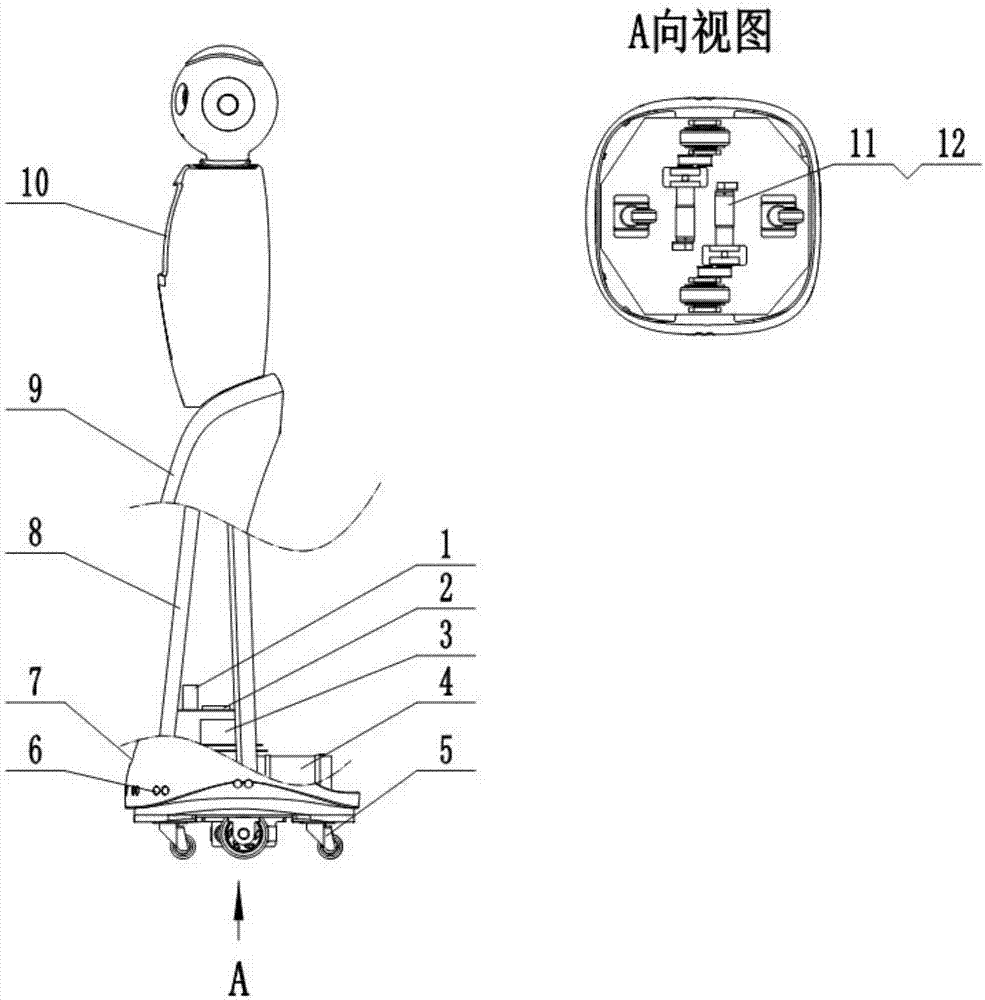
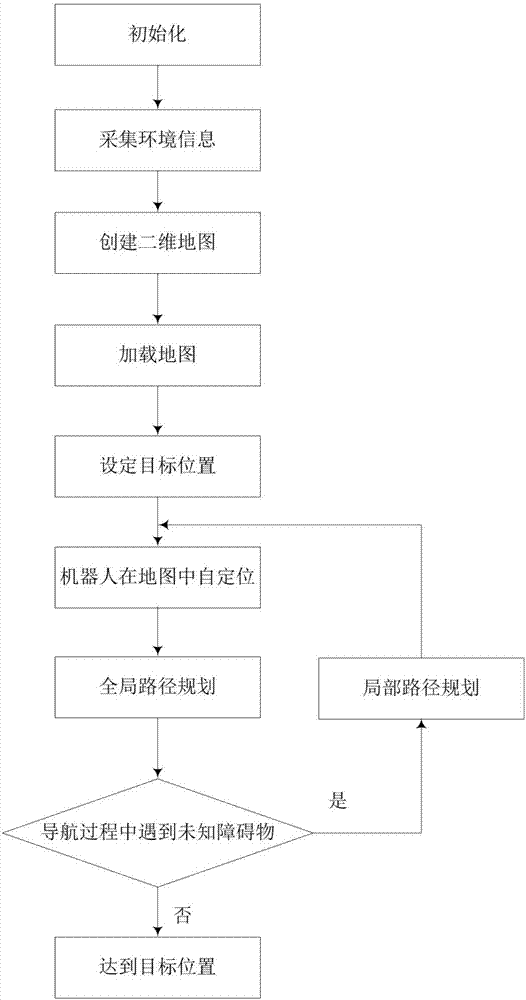
[0036] The present invention relates to a ROS-based service robot and its navigation method in an indoor environment. The service robot is a humanoid robot, comprising a mobile chassis, a shell 9, a support frame 8, an upper PC and a bottom PC3, and two PCs simultaneously The same version of the robot operating system is installed and connected via wifi. Start the service robot, start the data acquisition module 7 and the control module, use the control module to control the service robot to run indoors, the data acquisition module 7 obtains the indoor environment information, that is, the indoor obstacle information, uses the slam_gmapping function package to create an indoor environment map, and then serves The robot loads the created indoor map, and a two-dimensional map of the indoor environment can be seen on the touch screen installed on the front chest of the robot. We can ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com