Robot disordered grasping device and method based on double cameras
A grasping device and robot technology, applied in the direction of measuring devices, instruments, conveyor objects, etc., can solve the problems of inaccurate identification of object information, affecting the working efficiency of robots, low success rate of grasping or sorting, etc., and achieve placement accuracy. High, fast and stable random grabbing, fast random grabbing and precise placement effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
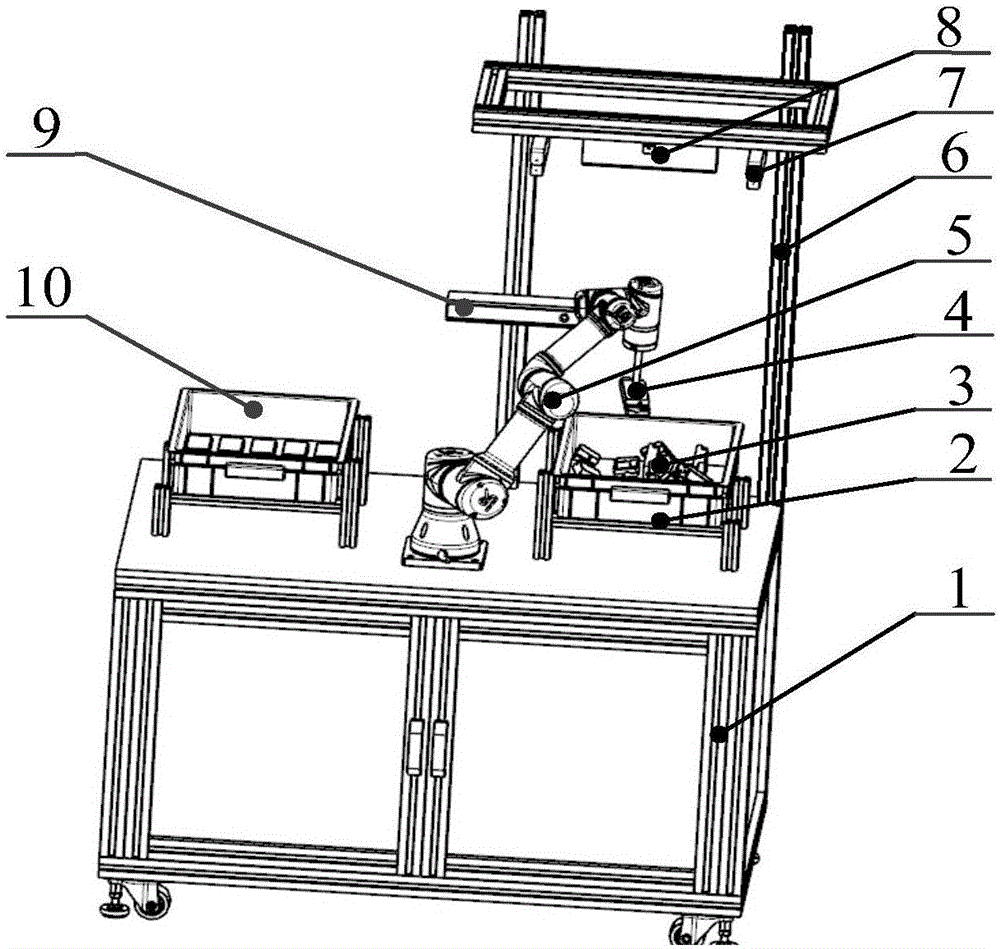
[0024] Such as figure 1 As shown, a robot random grabbing device based on dual cameras includes a workbench 1 , a retrieving box 2 , a suction cup 4 , a robot 5 , a bracket 6 , a machine vision system and a discharging box 10 .
[0025] Specifically, the fetching box 2 and the discharging box 10 are arranged at intervals on the workbench 1, and the robot 5 is arranged on the workbench 1 and is located at the fetching box 2 and the discharging box 10. Between, the suction cup 4 is set on the end effector of the robot 5; the bracket 6 is set on the workbench 1 near the end of the retrieving box 2, and the machine vision system is set on the bracket 6, and the machine vision system, suction cup 4 and robot 5 are elect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com