AGV path tracking and obstacle avoiding coordination method based on A* extraction guide point
A technology of path tracking and coordination method, which is applied in control/adjustment system, vehicle position/route/height control, two-dimensional position/channel control, etc., which can solve the problem of many global path nodes, lack of buffer zones, and inability to guarantee AGV robots safety issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
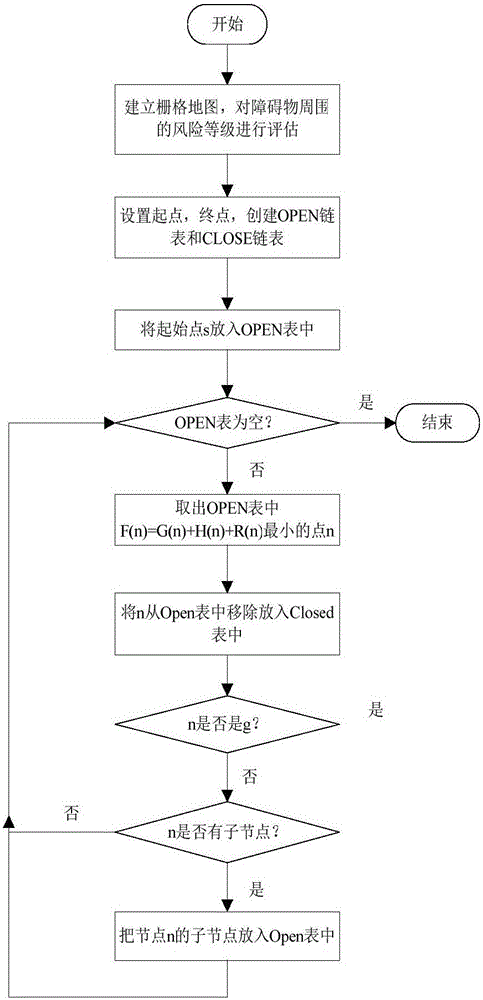
[0051] Embodiment: the method for path planning, tracking and obstacle avoidance of AGV robot in the embodiment of the present invention, the operation process of concrete implementation is as follows:
[0052] 1: Create an initial grid map map based on environmental information.
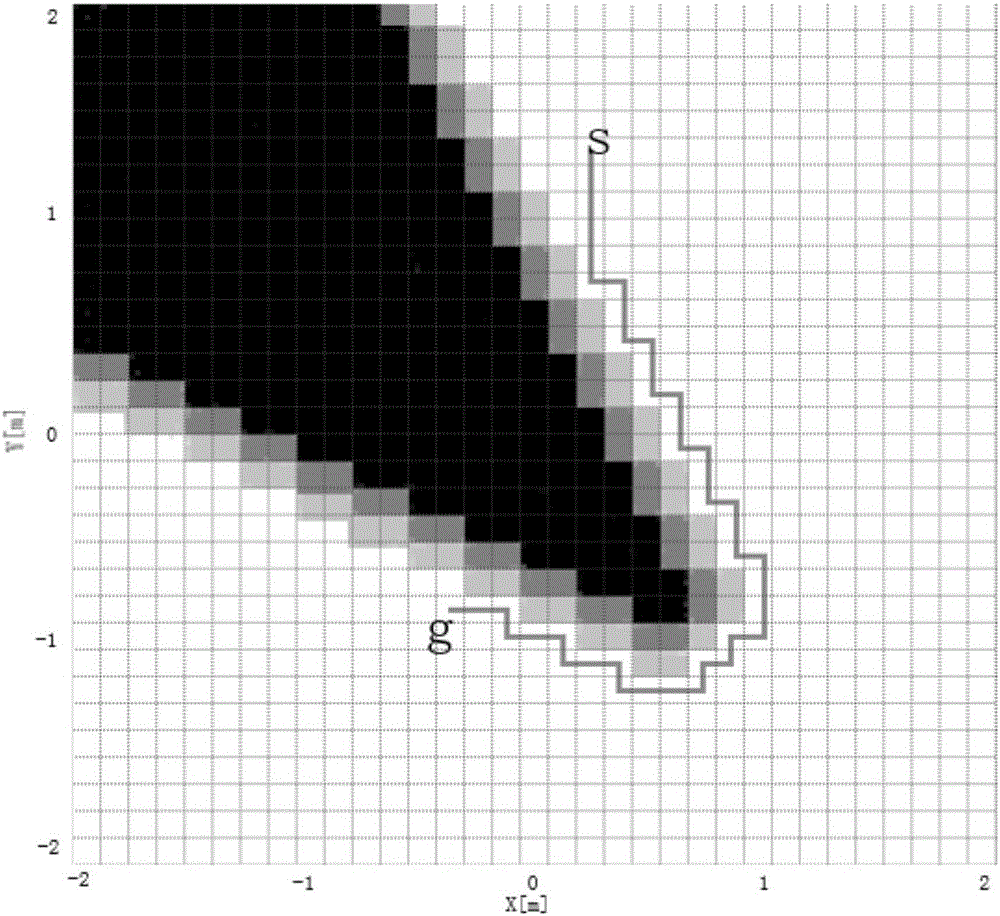
[0053] 2: On the initial grid map, use the risk assessment function R(n) to evaluate the risk level of the nodes around the obstacle, and obtain a new safety grid map map_r with risky areas.
[0054] 2.1) Convert the original map data into image data, and perform expansion processing with the AGV radius through the cvDiate function in OpenCV.
[0055] 2.2) Use the cvfilter2D function to perform template operations on the expanded map. The initial grid map consists of obstacle grids and blank grids. The obstacle grid node indicates that there is an obstacle, and the gray value is 255; the blank grid node indicates that there is no obstacle at all, and the gray value is 0; so the initial map is proc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com