Novel five-freedom-degree manipulator
A manipulator and degree-of-freedom technology, applied in the field of manipulators, can solve the problems of immature handling robot technology, hindering production, and unable to meet the needs of enterprises, and achieves the effect of simple structure, high production reliability and good applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with drawings and embodiments.
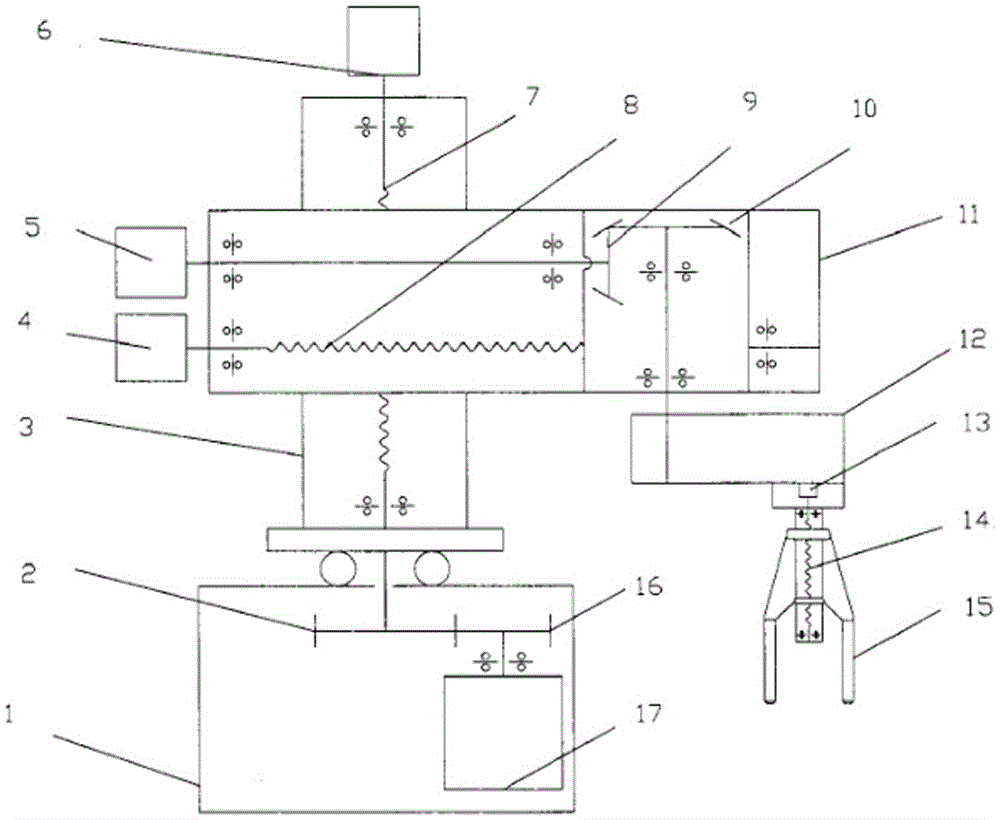
[0028] Such as figure 1 , the manipulator is composed of base, waist, vertical arm, cantilever, wrist, end effector, driving device, and transmission device. There are five degrees of freedom in total, which are waist rotation, vertical arm vertical movement, cantilever horizontal movement, and wrist Pitching and opening and closing of the claws, it can grasp and carry the target object according to the received instructions.
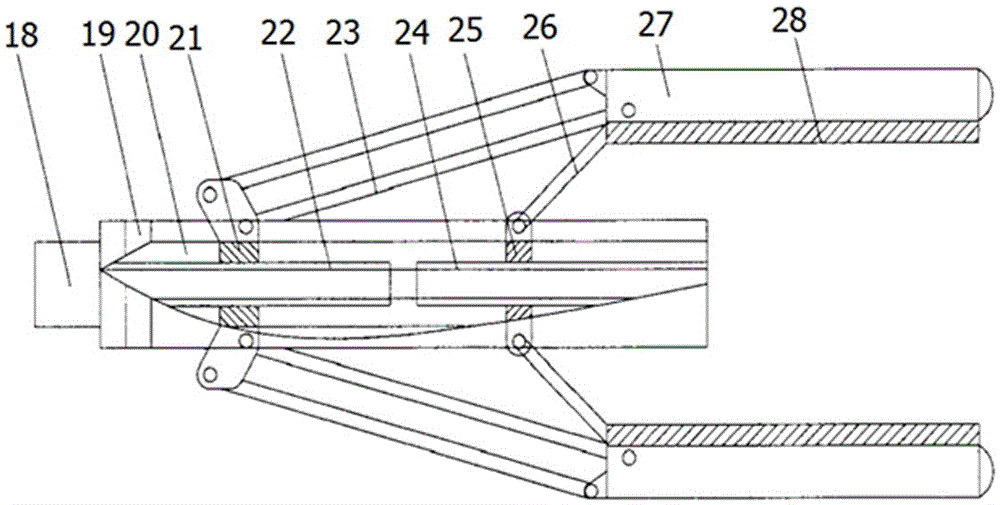
[0029] Such as figure 2 , the end effector of the manipulator is composed of fingers, force transmission mechanism, driving device, etc. It is a part that the manipulator directly uses to grab and hold the workpiece or clamp special tools (such as spray guns, wrenches, welding tools) for operation. It has imitation The function of human action. The opening and closing structure of the claw is designed as a rotary mechanism, which realizes the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com