Intelligent obstacle avoiding and positioning system for floor sweeping robot
A sweeping robot and intelligent obstacle avoidance technology, applied in the direction of two-dimensional position/channel control, etc., to achieve the effects of program modulation optimization, accurate information, and low production cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0023] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
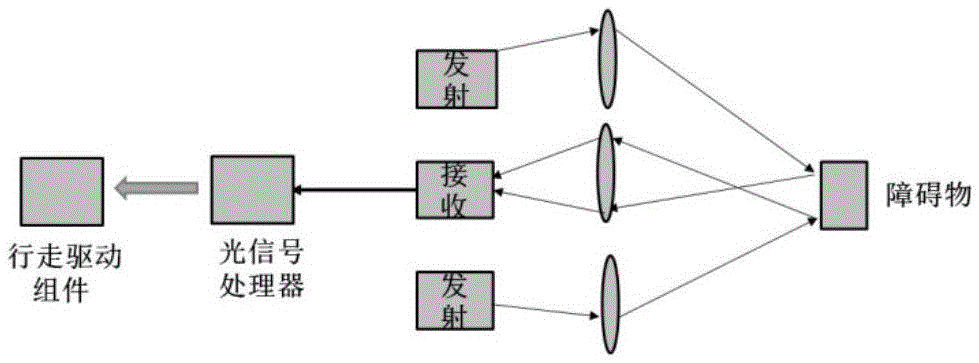
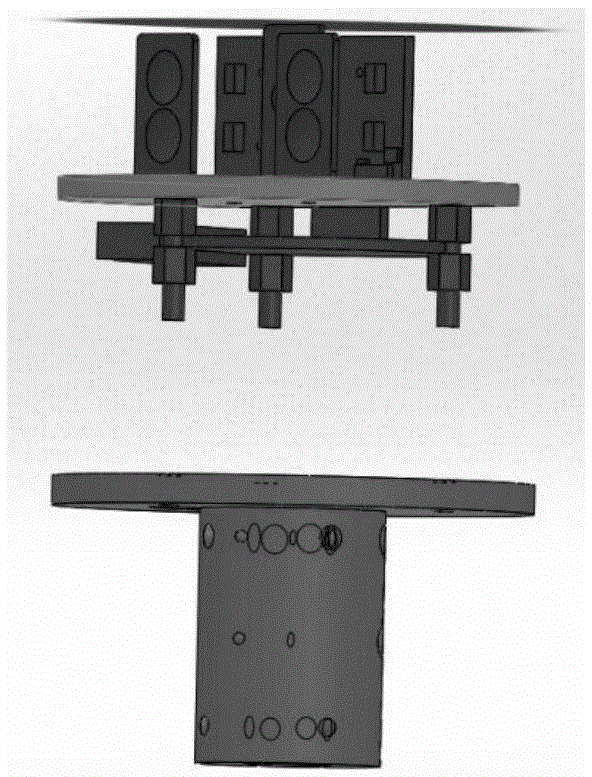
[0024] Such as figure 2 As shown, in an example of the present invention, it includes a housing, an infrared light emitting module 1, an infrared light emitting lens group 2, an infrared light receiving lens group 3, an optical signal processing unit (epc chip) 4, and a single-phase DC motor 5 , fixed-ratio parallel shaft gearbox, slip ring and corresponding drive circuit.
[0025] (1) After the infrared emission module 1 receives the measurement command, it drives the infrared LED to emit infrared light in a current modulation mode, and after being focused by the infrared light emission lens group 2, it directly emits into the environment.
[0026] (2) Infrared light propagates in the air, and it is reflected and scattered when encounter...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com