Medical spherical micro robot remote control system and working method thereof
A remote control system and micro-robot technology, applied in the field of medical spherical micro-robot remote control system, can solve the problems of restricting comprehensive diagnosis and treatment of gastrointestinal diseases, hidden safety hazards, and high requirements for operating doctors, so as to facilitate large-scale production and reduce potential Threat, flexibility-enhancing effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
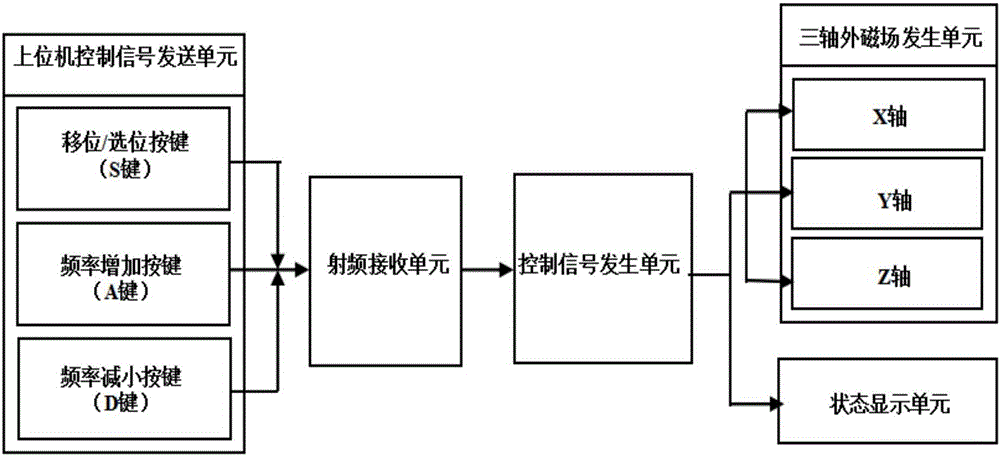
[0035] Embodiment: a kind of medical spherical micro-robot remote control system (see figure 1 ), which is characterized in that it includes an upper computer control signal sending unit, a radio frequency receiving unit, a control signal generating unit, a status display unit and a three-axis external magnetic field generating unit; wherein, the input terminal of the radio frequency receiving unit receives the upper computer control signal sending The control signal output by the unit, the output end of the radio frequency receiving unit is connected with the control signal generating unit; the control signal generating unit can output a sinusoidal current signal as the input signal of the three-axis external magnetic field generating unit; the three-axis external magnetic field generating unit The space universal rotating magnetic field can be generated as an external driving source for driving the medical spherical micro-robot; the state display unit can display the frequenc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com