Forced switching module of working mode of nuclear industrial robot in nuclear environment
A technology of working mode and forced switching, which is applied in the direction of program control and electrical program control in the sequence/logic controller, can solve the problem that the robot is difficult to recover, and achieve the effect of reducing losses
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
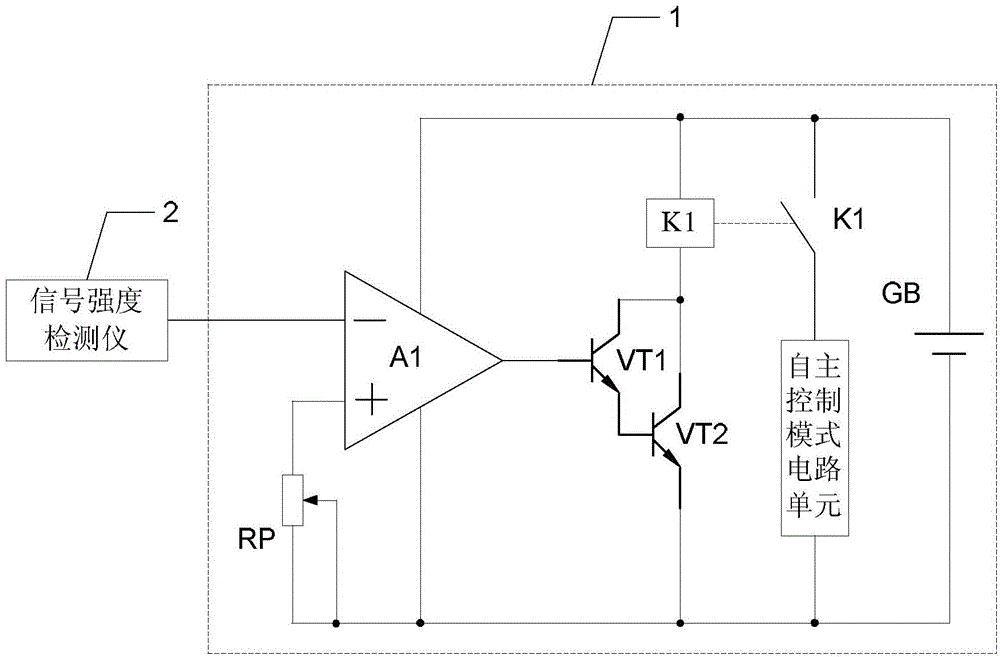
[0012] Specific implementation mode one: the following combination figure 1 Describe this embodiment, the mandatory switching module of the working mode of the nuclear industrial robot in the nuclear environment described in this embodiment, a signal strength detector 2 is arranged outside the radiation-proof casing 1, and a control circuit is arranged inside the radiation-proof casing 1 , the control circuit includes a battery GB, an intermediate relay K1, a comparator A1, a sliding rheostat RP, an NPN transistor VT1 and an NPN transistor VT2;
[0013] The wireless strength signal output terminal of the signal strength detector 2 is connected to the inverting input terminal of the comparator A1; the non-inverting input terminal of the comparator A1 is connected to a fixed terminal of the sliding rheostat RP;
[0014] The positive pole of the battery GB is simultaneously connected to the positive power supply terminal of the comparator A1, one end of the coil of the intermedia...
specific Embodiment approach 2
[0020] Embodiment 2: In this embodiment, Embodiment 1 is further described. The radiation-proof housing 1 is realized by coating an aluminum plate with a gallium arsenide coating.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com