Vector constraint-based random characteristic point selection method for landing position detection
A technology of random features and feature points, applied in the field of visual navigation, which can solve the problems that geographic coordinates cannot be calibrated in advance and the number of feature points is large.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
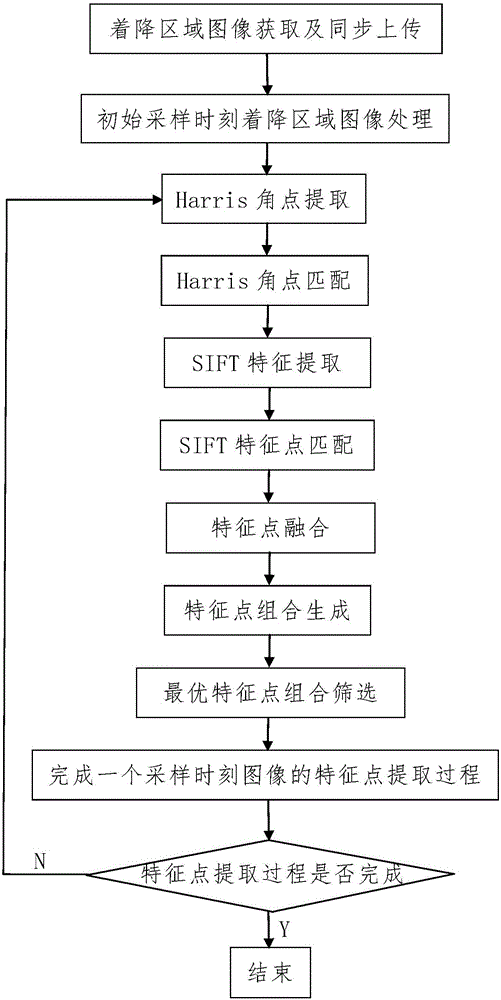
[0089] Such as figure 1 A random feature point selection method for landing position detection based on vector constraints is shown, including the following steps:
[0090] Step 1. Image acquisition and synchronous upload of the landing area: use image acquisition equipment and follow the pre-designed sampling frequency f 0 Acquiring the image of the landing area, and synchronously transmitting the acquired image of the landing area to the processor for processing; the image acquisition device is connected to the processor; wherein, f 0 ≤30Hz;
[0091] Step 2, landing area image processing: using the processor to process the landing area images acquired at each sampling time, the process is as follows:
[0092] Step 201, landing area image processing at the initial sampling time: using the processor to process the landing area image acquired by the image acquisition device at the initial sampling time, including the following steps:
[0093] Step 2011, Harris corner point e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com