A Hybrid 6-DOF Force Feedback Manipulator
A degree of freedom and force feedback technology, applied in the direction of manipulators, program-controlled manipulators, claw arms, etc., can solve the problems that cannot satisfy the free rotation movement of modeling designers, affect the precise positioning and real-time interaction of equipment, and have large motion inertia and equipment impedance. and other problems, to achieve the effect of reducing motion inertia and motion impedance, high rigidity, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
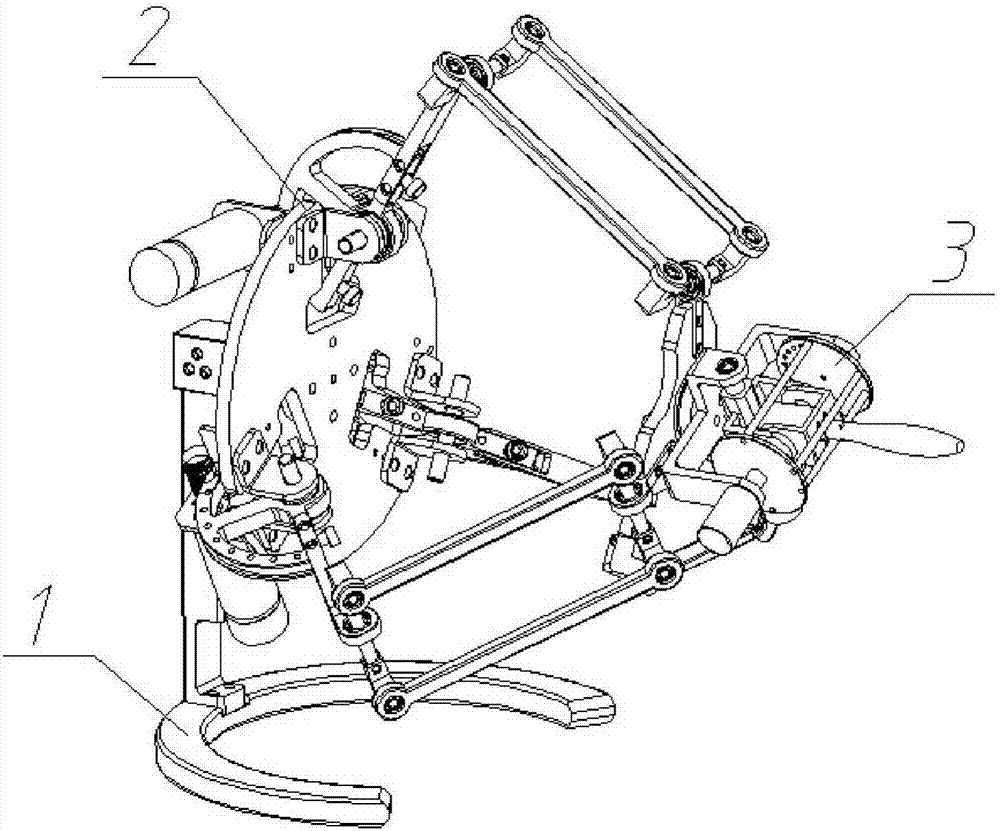
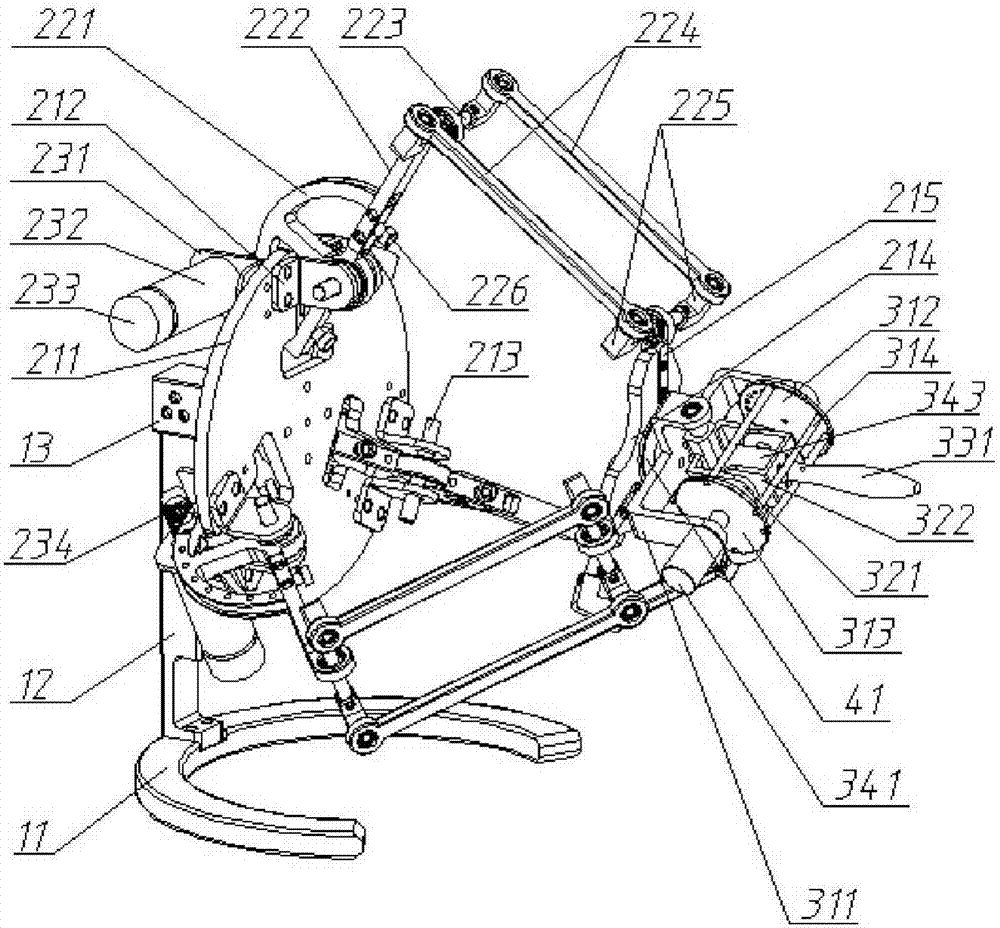
[0036] like figure 1 and figure 2As shown, a hybrid 6-DOF force feedback manipulator includes a base mechanism 1 , a parallel mechanism 2 arranged on the base mechanism, and a series mechanism arranged at the end of the parallel mechanism 2 .
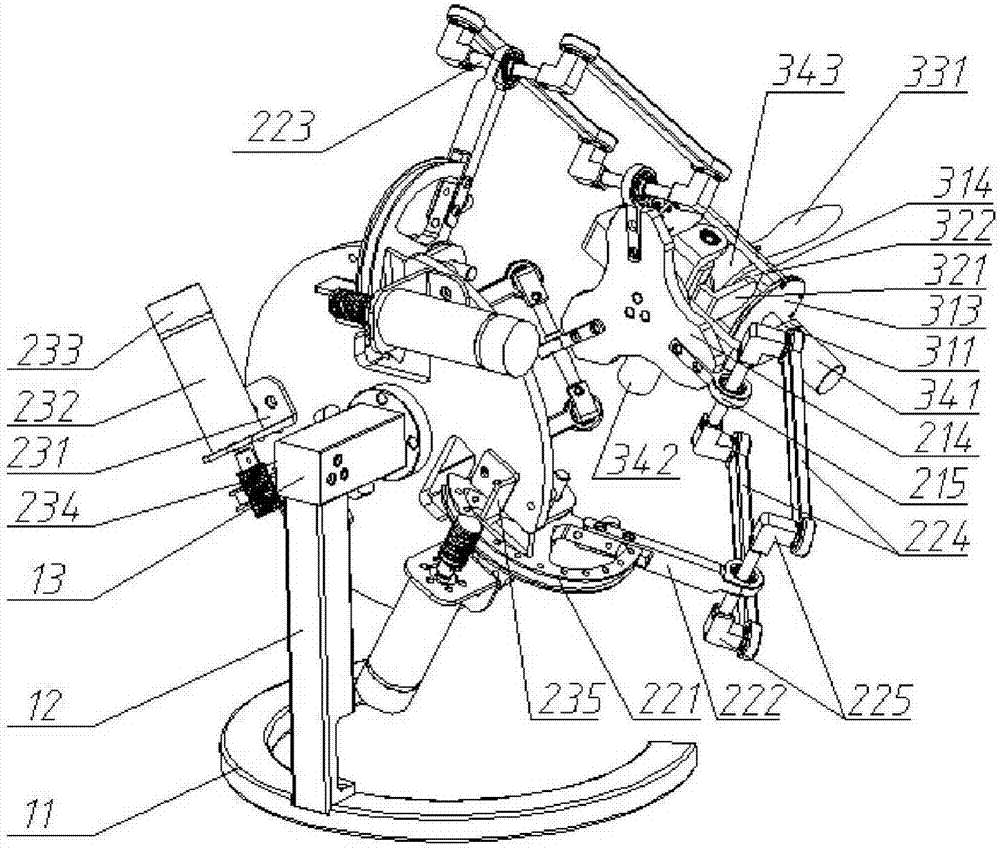
[0037] like Image 6 As shown, the base mechanism 1 includes a first support seat 11 placed on a horizontal plane, a second support seat 12 connected to the first support seat 11 by screws, and a third support seat 12 connected to the second support seat 12 by bolts 13. The three supporting bases constitute a cantilever bea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com