Fast SRP sound source positioning method
An implementation method and technology for sound source localization, which can be used in localization, measurement devices, instruments, etc., and can solve problems such as computational complexity and poor performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0146] The design method of the beam former of the method of the present invention is based on a convex optimized beam directing adjustable broadband robust far-field frequency-invariant beam former algorithm.
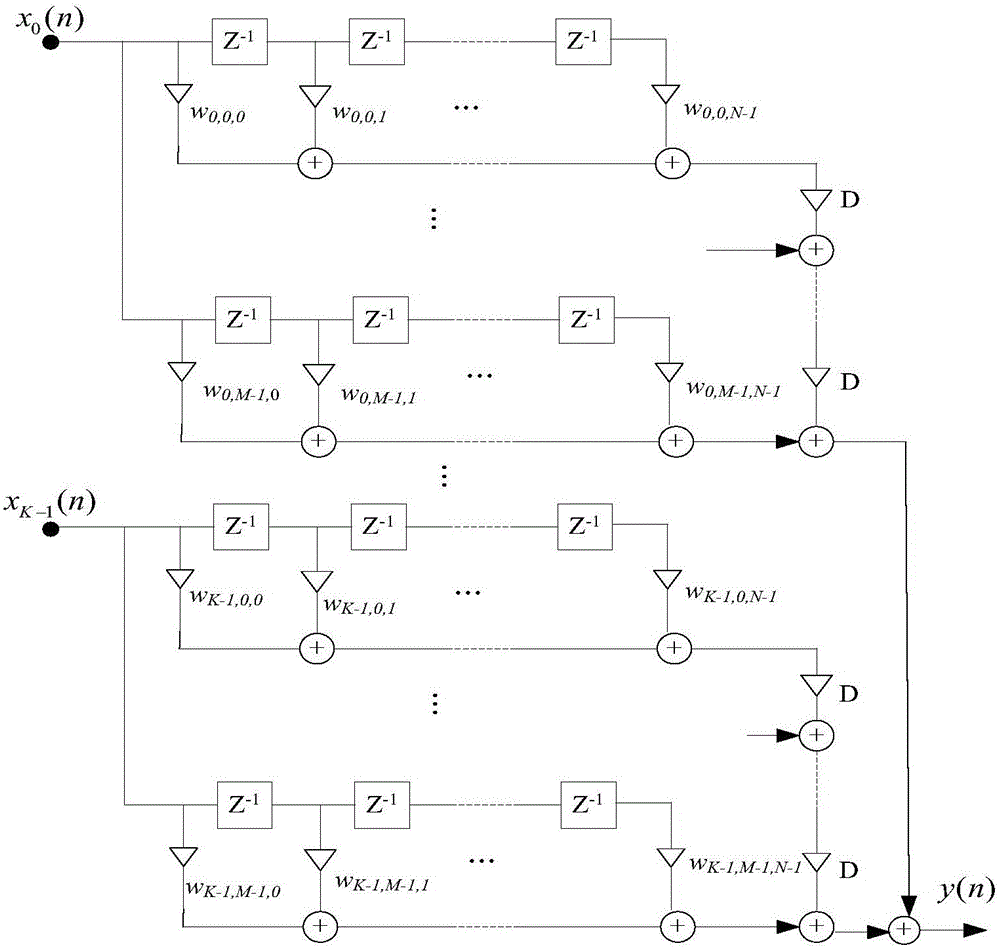
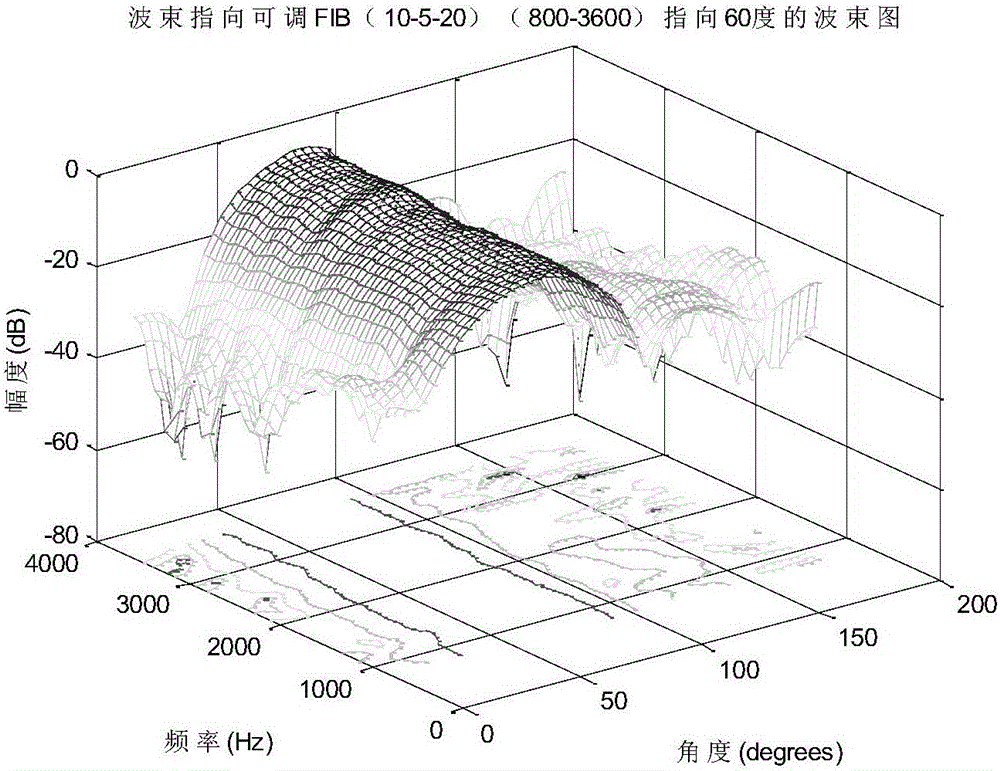
[0147] The existing beamformer design technology includes a broadband robust far-field beamformer algorithm based on convex optimization least squares beam pointing adjustable. The algorithm of the present invention has obvious performance advantages when the frequency band distribution of the processing voice signal is wide . For this reason, an example is given to illustrate the performance comparison of the two algorithms in the same environment. Consider the formation of the Farrow structure beamformer: the number of array elements is 10, the order is 5, the number of taps is 20, the signal frequency band is distributed in [800Hz, 3600Hz], the array element spacing is 5cm, and the adjustable direction range is from 40° to 140°, the reference frequency is 8000Hz, a...
Embodiment 2
[0149] The method of the invention shows that the Farrow structure beamformer itself has systematic errors. Calibration work plays a large role in this invention. The root cause of this step is that the Farrow structure beamformer itself has systematic errors. We demonstrate this theory with concrete examples.
[0150] Assume that there is a uniformly distributed line of microphones with a dimension of 10×5×20, that is, there are 10 microphones, and each microphone is connected to a 5th-order FIR filter, and each FIR has 20 taps. The distance between adjacent microphones is 5cm, and the sampling frequency is f s = 8000Hz. The beam adjustable direction range Ψ is set to The frequency range of interest Ω is [1000-3000]Hz, the reference frequency f r =2600. In each beam pointing, the passband bandwidth (PW) is set to 40°. Within the range of angles we define, each beam points down to the left and right stop bands [0°, φ d -PW / 2-20°], [φ d +PW / 2+20°,180°], where φ d is ...
Embodiment 3
[0153] The method of the present invention accounts for the effect of calibration work on the performance of the Farrow-SRP-PHAT algorithm. The calibration work was done to remove systematic errors of the Farrow structure beamformer. This step plays a large role in the method of the present invention.
[0154] The speaker is located at coordinates (2.6, 2.8) m, and the center point of the microphone array is located at (3, 0) m;
[0155] Considering that the adjustable beam direction ranges from 40° to 140° with an interval of 2°, 10 Monte Carlo experiments are performed. Calculate the mean and variance of these 10 results, and use the root mean square error as the evaluation index.
[0156] Figure 9 It is the performance comparison diagram of the simulation in the reverberation noise environment with the signal-to-noise ratio of 10dB and 5dB, the reverberation of 300ms to 800ms and the interval of 50ms; Figure 10 It is the performance comparison chart of the simulation ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com