Distributed adaptive-neural-network continuous tracking control method of multi-robot system
A multi-robot and neural network technology, applied in the field of multi-robot system distributed adaptive neural network continuous tracking control, can solve the problems of multi-robot system parameter uncertainty, external interference, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
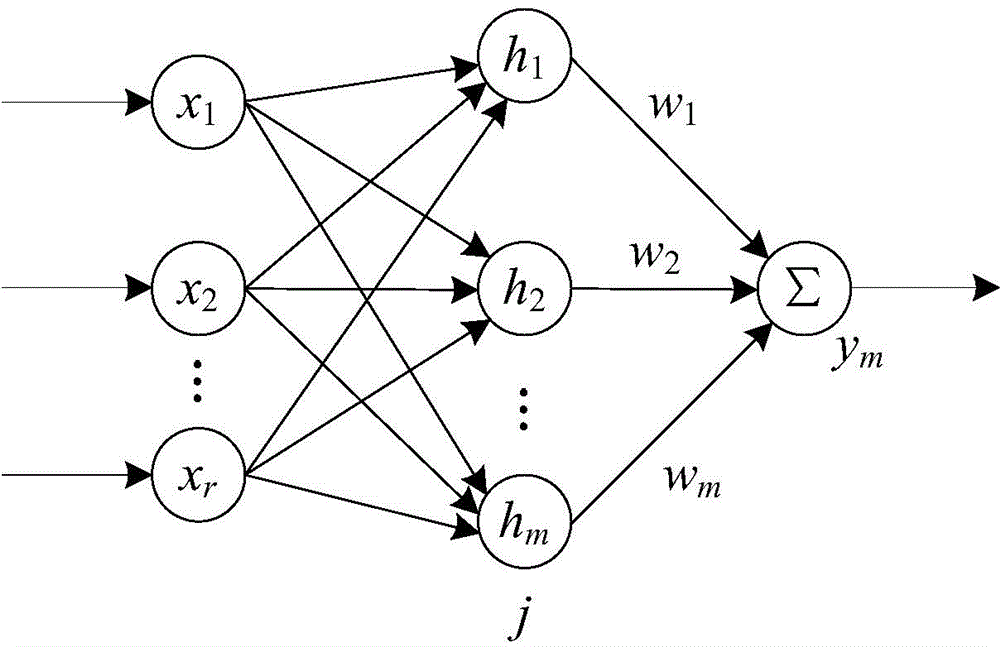
[0087] combine figure 1 and Figure 5 Describe the multi-robot system distributed adaptive neural network continuous tracking control method in this embodiment. First, introduce the related technologies applied in this embodiment:
[0088] 1. Euler-Lagrange model:
[0089] According to the Euler-Lagrange model: M i ( q i ) q · · i + C i ( q i , q · i ) q · i + G i ( q i ) = ...
specific Embodiment approach 2
[0147] Different from the specific embodiment 1, the Euler-Lagrange model described in step 1 satisfies antisymmetry and boundedness in the multi-robot system distributed adaptive neural network continuous tracking control method of this embodiment: is an antisymmetric matrix, given any vector x i ∈R p Have The boundedness refers to the existence of normal constants and make where I p is a p×p order identity matrix.
[0148] Prove that the observer is bounded
[0149] Since the navigator is dynamic, according to the navigator's time-varying velocity formula and time-varying trajectory formula, v is a time variable, so v(t-τ)≠v(t). Therefore, substituting the time-varying velocity formula (6) and the time-varying trajectory formula (7) into the control formula (8) of the distributed observer can get: η ‾ · = A η ‾ · ...
Embodiment 1
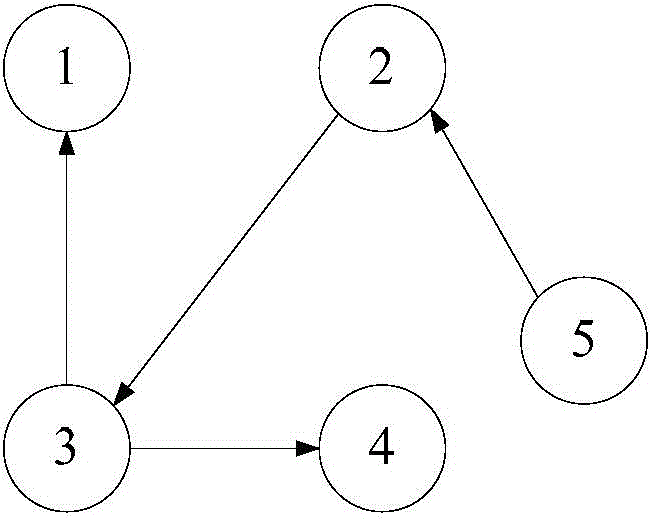
[0170] Embodiment carried out according to specific embodiment 2: a directed communication network composed of five two-degree-of-freedom manipulator robot systems, wherein numbers 1 to 4 are trackers, and number 5 is a navigator, such as figure 2 shown.
[0171] The Euler-Lagrange dynamic equation of each follower is as follows:
[0172] M i ( q i ) q · · i + C i ( q i , q · i ) q · i + G i ( q i ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com