Soft touch joint based on joint cross structure
A cross-axis, soft contact technology, applied in the field of space robot research and engineering, can solve problems such as energy shock, and achieve the effects of reducing shock vibration load, continuously adjustable damping force, and low energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
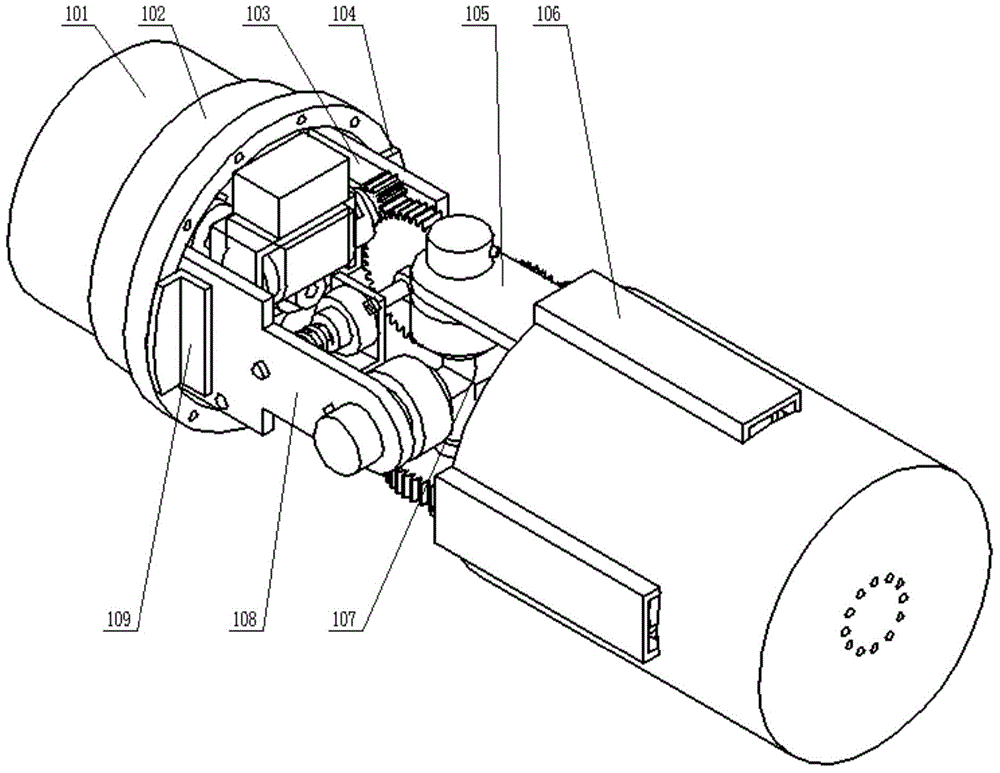
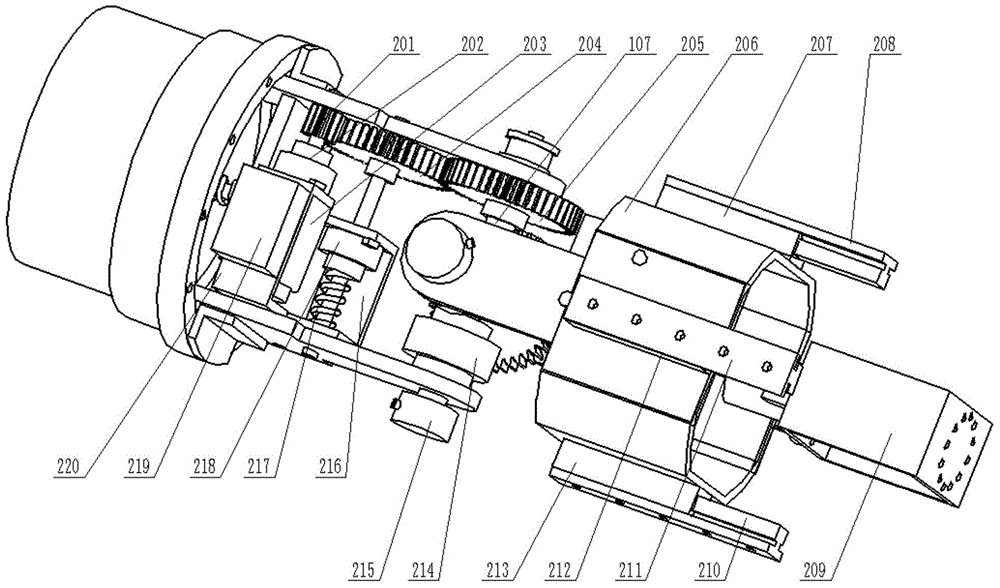
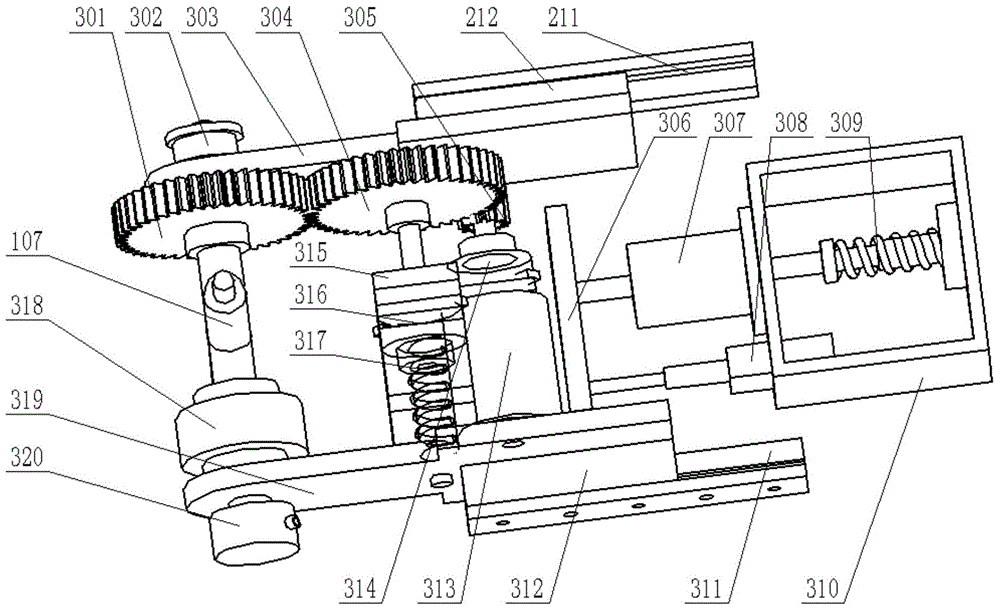
[0025] Attached below Figure 1~4 To further explain the present invention in detail:
[0026] The section of the invention includes three parts: a drive transmission mechanism, a damping assembly and a sensing component.
[0027] The drive transmission mechanism mainly includes motor drive unit one (203), motor drive unit two (313), clutch one (202), clutch two (314), gear set, cross shaft (107), controller (219) ), housing (101, 102, 106, 206), bracket one (103), bracket two (105), bracket three (108), bracket four (319) and motor base (220) consisting of mechanical mechanism; damping The components include linear magnetorheological damper (307), spring mechanism (309), slide one (207), slide two (212), slide three (213), slide four (312), electromagnetic system A straight line composed of moving slide one (208), slide two (211), slide three (210), slide four (311), sliding inner shell (206), sliding outer shell (106) and support (310) The damping component is composed of rota...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com