Autonomous navigation type surface water quality sampling and real-time monitoring water level robot
A technology for autonomous navigation and water quality sampling. It is applied in the direction of testing water and material inspection products. It can solve problems such as the inability of ships to operate, the threat to the health of sampling personnel, and the inconvenience of testing water samples, so as to simplify the sampling and monitoring process, sampling and monitoring. Fast speed, stable and reliable sampling data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
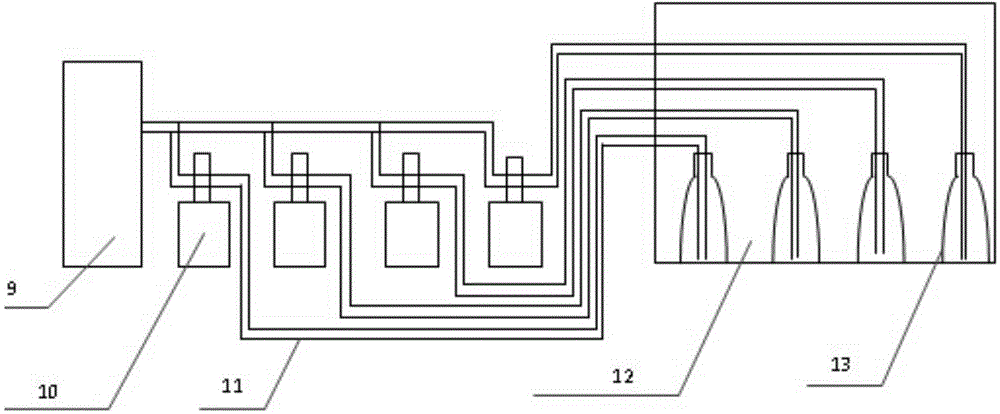
[0016] Below in conjunction with accompanying drawing, the present invention is further described:
[0017] Such as figure 1 As shown, the self-navigating surface water quality sampling and real-time monitoring surface robot includes the hull 2 and the power system on the hull 2, 3, the main control system 1, the navigation system, the sampling monitoring system and the propulsion system 15. The main control system 1 includes a single-chip microcomputer and peripheral circuits, the navigation system includes an electronic compass and a GPS positioning system, 6, and its attitude sensor is integrated on the main control system 1 . The main control system 1 is directly connected to the wireless data transmission and image transmission module 14, and the data collected by the robot is sent to the ground base station for display and recording through the wireless data transmission and image transmission module 14. The main control system 1 controls the propeller and the samplin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com