Method and system for configuring measurement reference signal power control parameters in a time division duplex system
A technology for power control parameters and measuring reference signals, applied in the field of communication
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0195] A power control parameter defined by P O_PUSCH,c , α c , f c composition. There are two power control parameters, which are power control parameter 1: 1 O_PUSCH,c , α c 1 , f c 1 > and power control parameter 2: 2 O_PUSCH,c , α c 2 , f c 2 >.
[0196] Note: P O_PUSCH,c by P O_NOMINAL_PUSCH,c and P O_UE_PUSCH,c It consists of two parts. Therefore P 1 O_PUSCH,c with P 2 O_PUSCH,c can be P O_NOMINAL_P different, or P O_UE_PUS different, or P O_NOMINAL_P and P O_UE_PUSCH,c all different.
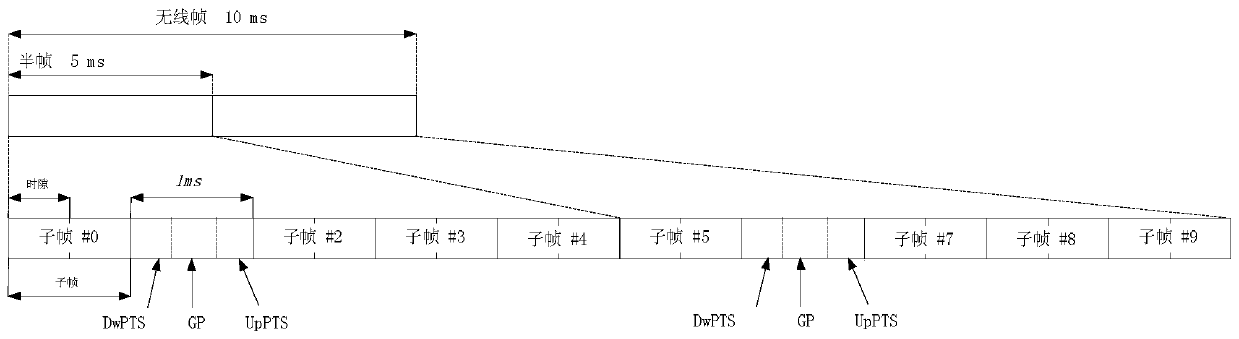
[0197] The SRS resource refers to: a time domain location and / or a frequency domain location. Using different power control parameters for different SRS resources refers to using different power control parameters for different time domain positions and / or frequency domain positions. The SRS resource is in the UpPTS, and there are 2 symbols in an UpPTS for SRS (2ms period) and the SRS resource is used for Trigger type0 SRS.
[0198] Figure 5 It shows that when...
Embodiment 2
[0201] A power control parameter is defined by α c , f c composition. There are two power control parameters, which are power control parameter 1: c 1 , f c 1 > and power control parameter 2: c 2 , f c 2 >.
[0202] The SRS resource refers to: a time domain location and / or a frequency domain location. Using different power control parameters for different SRS resources refers to using different power control parameters for different time domain positions and / or frequency domain positions.
[0203] Let the Trigger type0 SRS be sent in subframes 2 and 7.
[0204] Figure 7 Shows the situation of using power control parameters 1 and 2 alternately in each frequency hopping period when the frequency hopping position is 3: the power control parameters used by the terminal at the same frequency domain position between adjacent frequency hopping periods different. Each time domain position in the same frequency hopping period uses the same power control parameter.
Embodiment 3
[0206] A power control parameter defined by P O_PUSCH,c , α c composition. There are two power control parameters, which are power control parameter 1: 1 O_PUSCH,c , α c 1 > and power control parameter 2: 2 O_PUSCH,c , α c 2 >.
[0207] Note: P O_PUSCH,c by P O_NOMINAL_PUSCH,c and P O_UE_PUSCH,c It consists of two parts. Therefore P 1 O_PUSCH,c with P 2 O_PUSCH,c can be P O_NOMINAL_P different, or P O_UE_PUS different, or P O_NOMINAL_PUSCH,c and P O_UE_PUSCH,c all different.
[0208] Configure two SRS processes. The time domain positions of the two SRS processes are different (configured independently through the period and subframe offset), and the positions in the frequency domain are different (independently configured through the frequency domain start PRB and or frequency hopping parameters).
[0209] like Figure 8 As shown, for Trigger type0 SRS, the period of process 1 is 5ms, and the subframe offset is 0; the period of process 2 is 5ms, and the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com