Satellite attitude determining method based on improved self-adaptive square root UKF (Unscented Kalman Filter) algorithm
An adaptive square root and satellite attitude technology, applied to integrated navigators and other directions, can solve the problems of large rounding error satellite attitude determination system, unstable satellite attitude estimation accuracy, low satellite actual state tracking ability, etc., to improve tracking ability , Enhanced tracking ability and good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
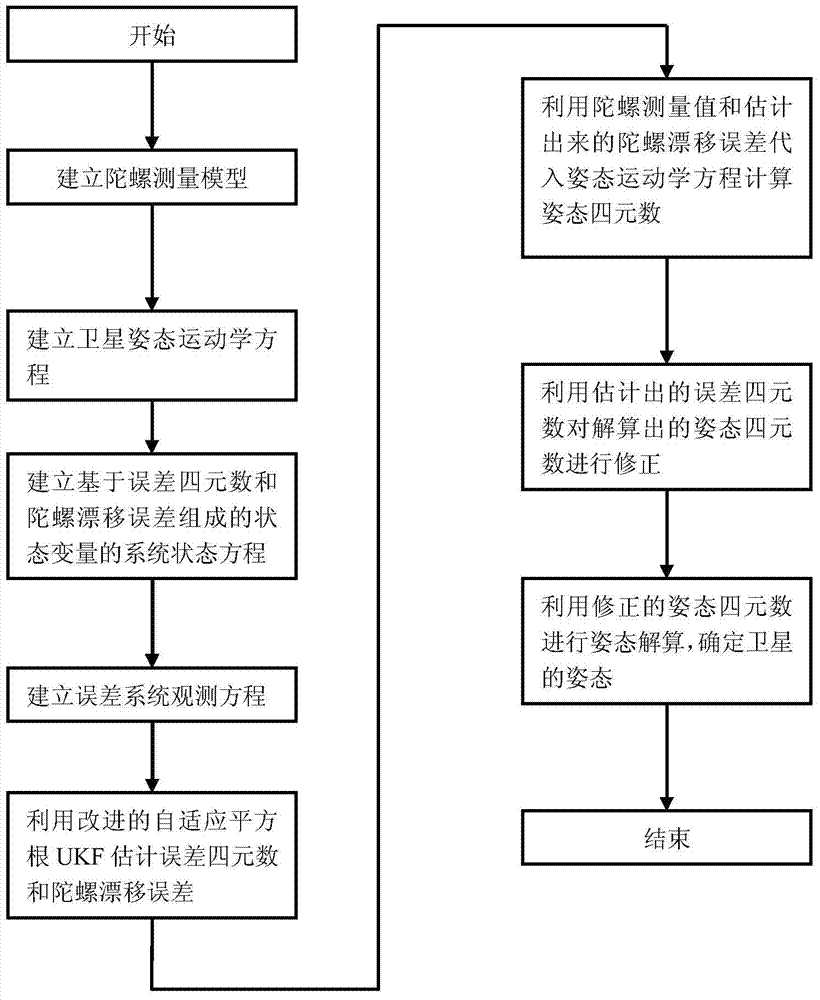
[0013] Specific embodiment one: a kind of satellite attitude determination method based on the improved self-adaptive square root UKF algorithm described in the present embodiment is characterized in that described method comprises the following steps:
[0014] Step 1. Establish a gyroscope measurement model;
[0015] Step 2, establishing satellite attitude kinematic equations;
[0016] Step 3, establishing the system state equation based on the state variable composed of the error quaternion and the gyro drift error;
[0017] Step 4, establishing the error system observation equation;
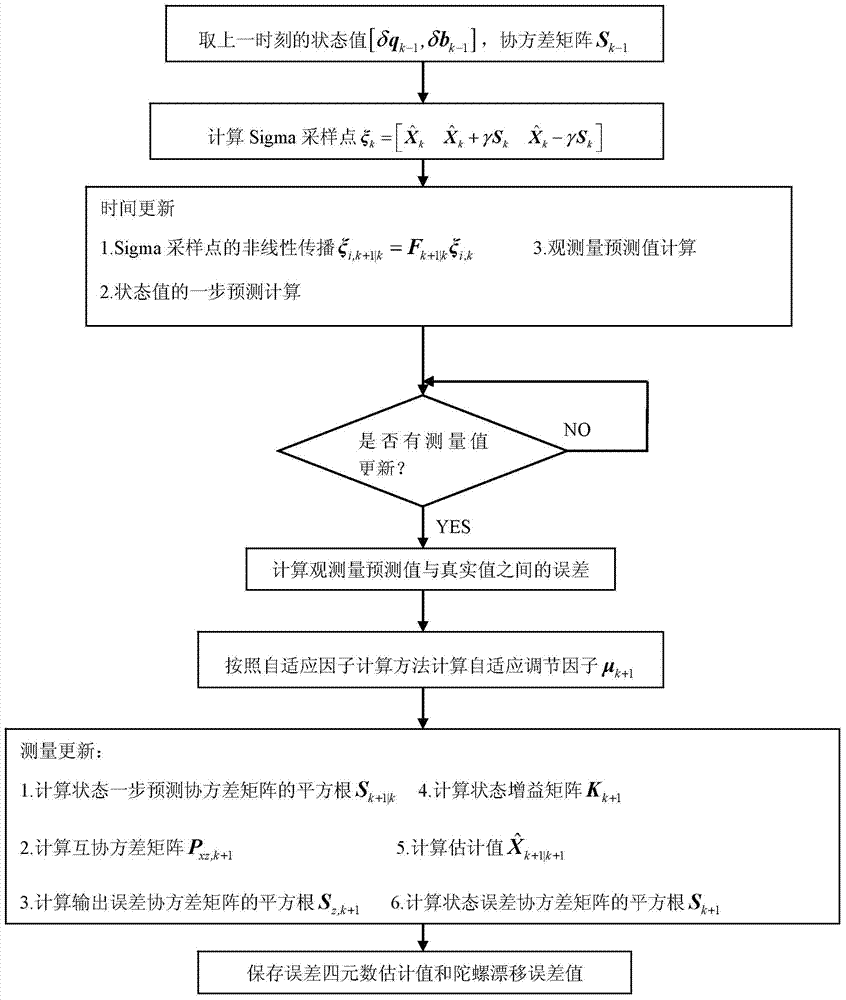
[0018] Step 5, using the improved adaptive square root UKF to estimate the error quaternion and gyro drift error;
[0019] Step 6. Substituting the gyro measurement value and the estimated gyro drift error into the attitude kinematics equation to calculate the attitude quaternion;
[0020] Step 7, using the estimated error quaternion to correct the attitude quaternion calculated by the solu...
specific Embodiment approach 2
[0022] Embodiment 2: The difference between this embodiment and Embodiment 1 is that the specific process of establishing the gyro measurement model described in step 1 is: when the gyro measurement coordinate system and the coordinate system of the star are the same coordinate system, the gyro The measurement model is
[0023] g ( t ) = ω ( t ) + β ( t ) + η u ( t ) ...
specific Embodiment approach 3
[0027] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is: the specific process of establishing the satellite attitude kinematics equation described in step two is: the satellite attitude quaternion is defined as
[0028] q=[q 1 q 2 q 3 q 4 ] T (3)
[0029] In the formula, q 4 =cos(θ / 2), and θ are unit rotation vector and rotation angle respectively;
[0030] Quaternions satisfy the following constraints:
[0031] q 1 2 + q 2 2 + q 3 2 + q 4 2 = 1 - - - ( 4 )
[0032] The kinematics equation of satellite attitude expressed by quaternion is:
[0033] dq ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com