Maximum torque estimation and acceleration slip regulation algorithm for four-wheel independently driven electric vehicle
A four-wheel independent drive, maximum torque technology, applied in electric vehicles, control drive, power management and other directions, can solve the problems of complex vehicle speed and acceleration, reduced reliability, and dynamic control problems are not well solved.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The method proposed by the present invention will be further described below in conjunction with the drawings and embodiments.
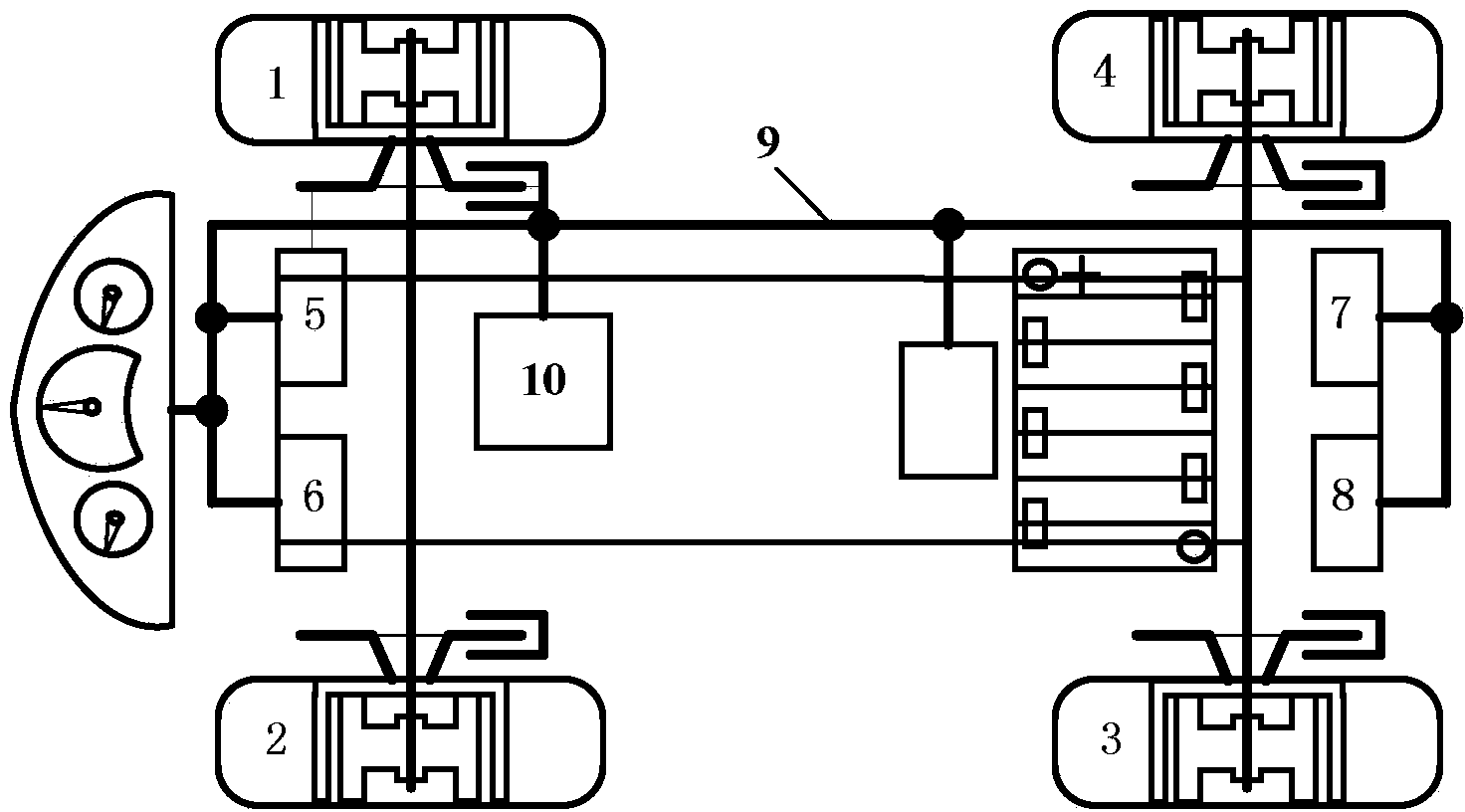
[0035] The realization platform of the present invention is any conventional four-wheel independent drive electric vehicle, such as figure 1 As shown, the platform includes four independent drive motors 1, 2, 3, 4 (which themselves can provide wheel speed information), four corresponding motor controllers 5, 6, 7, 8, and a vehicle control The CAN network 9 implementing communication between the device 10 and the power supply controllers 5, 6, 7, 8. The main function of the motor controllers 5, 6, 7, and 8 is to collect the speeds of the corresponding four wheels, and use the torque command provided by the vehicle controller 10 to complete the torque closed-loop control of the corresponding drive motors 1, 2, 3, and 4 The function of the vehicle controller 10 is to determine whether the corresponding four wheels are slipping according to the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com