Six-axis degree-of-freedom manipulator
A technology with a degree of freedom and a manipulator, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems that products cannot be mass-produced, production costs increase, and transmission efficiency is low, so as to achieve compact structure, reduce intermediate transmission links, and transmission. high efficiency effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
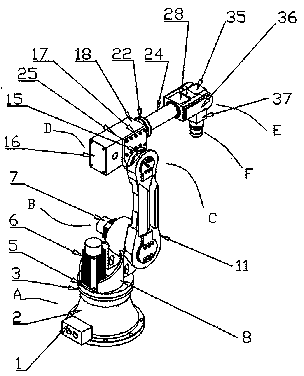
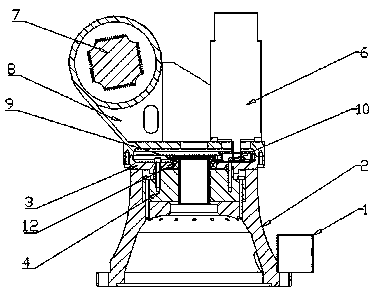
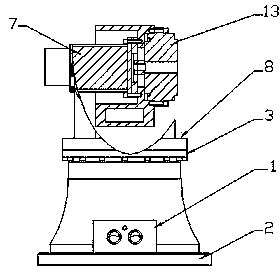
[0033] Examples such as figure 1 As shown, the six-axis degree of freedom manipulator includes a base 2, and a first transmission mechanism A is arranged in the base 2, and a second shaft support 8 is fixedly connected to the first transmission mechanism A, and the second shaft support 8 The other end is connected with a second transmission mechanism B, and the first transmission mechanism A can drive the second shaft support 8 and the base 2 to rotate horizontally ±180°;
[0034] The boom 11 is fixedly connected to the second transmission mechanism B, and the second transmission mechanism B can drive the boom 11 and the second shaft support 8 to perform a -65°~120° pitch rotation;
[0035] The other end of the boom 11 is connected with a third transmission mechanism C, and the third transmission mechanism C is fixedly connected with a three-axis connecting seat 17, and the third transmission mechanism C can drive the three-axis connecting seat 17 and the boom 11 to perform ±9...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com