A mobile robot positioning method with manual online correction function
A mobile robot and positioning method technology, applied in navigation calculation tools, navigation through speed/acceleration measurement, etc., can solve the problem of affecting the accuracy of displacement change calculation, the direction error of displacement change, and the failure to meet the requirements of positioning accuracy, etc. problems, to avoid measurement problems, high precision, and ensure the effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment example
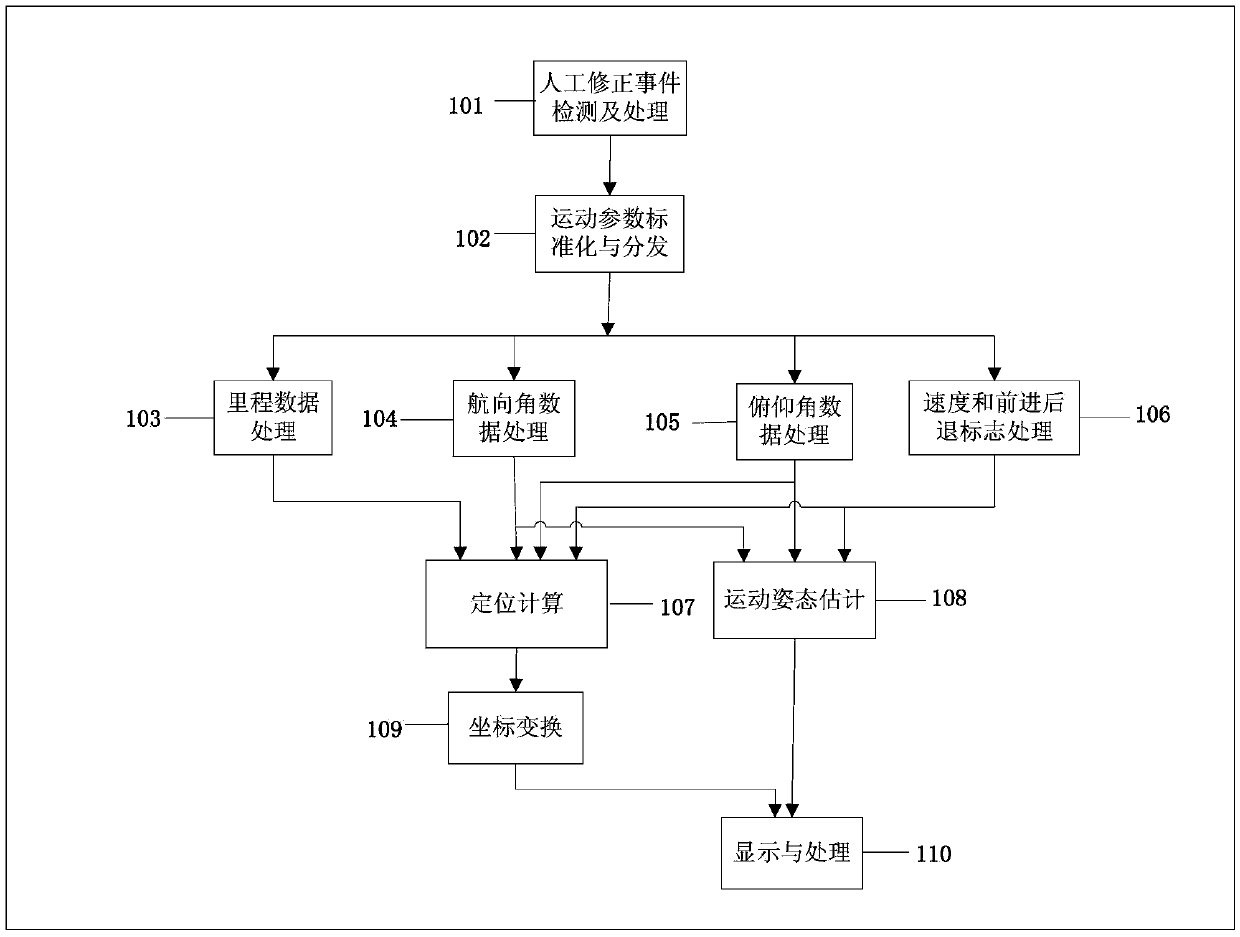
[0037] A mobile robot positioning method with manual online correction function, comprising the following steps:
[0038] 1) Detect whether there is a manual correction event, if there is a manual correction event processing, if not, go to step 2);
[0039] (1.1) Obtain the exact position coordinates of the robot set by the operator on the navigation map The setting method can be manually inputting coordinates, manually clicking on the map to obtain coordinates, or manually dragging the map to obtain coordinates, etc.;
[0040] (1.2) According to the momentary position coordinates before the kth manual correction The position coordinates set at the kth correction And the position coordinates set during the k-1th correction Calculate the current heading angle correction
[0041] (1.3) Set the manual correction event flag to 1 to notify the positioning calculation.
[0042] 2) Standardize the motion parameters transmitted from the robot side, including conversion proc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com