Offshore drilling platform automatic piping system
A technology for offshore drilling platforms and drilling platforms, which is applied in the direction of drill pipes, drilling equipment, and drill pipes, and can solve problems such as low work efficiency, time-consuming drilling tool stand transportation, and long docking process time, so as to improve work efficiency and shorten Docking time and the effect of reducing construction costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
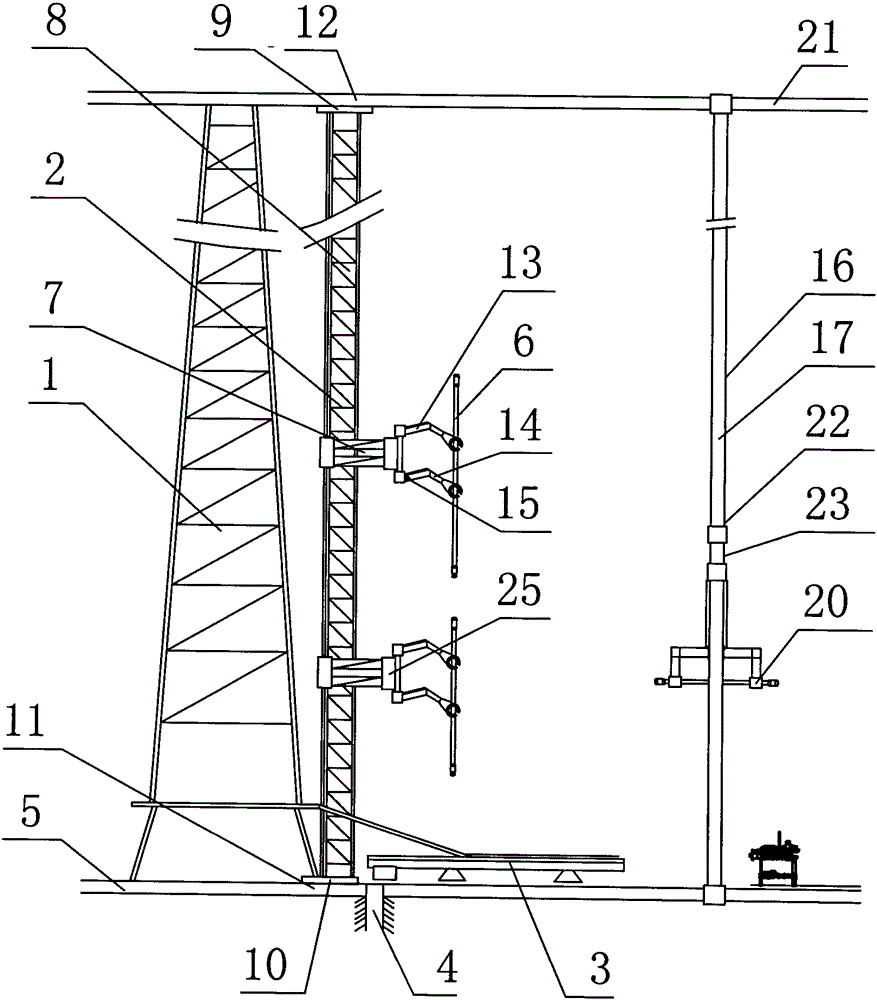
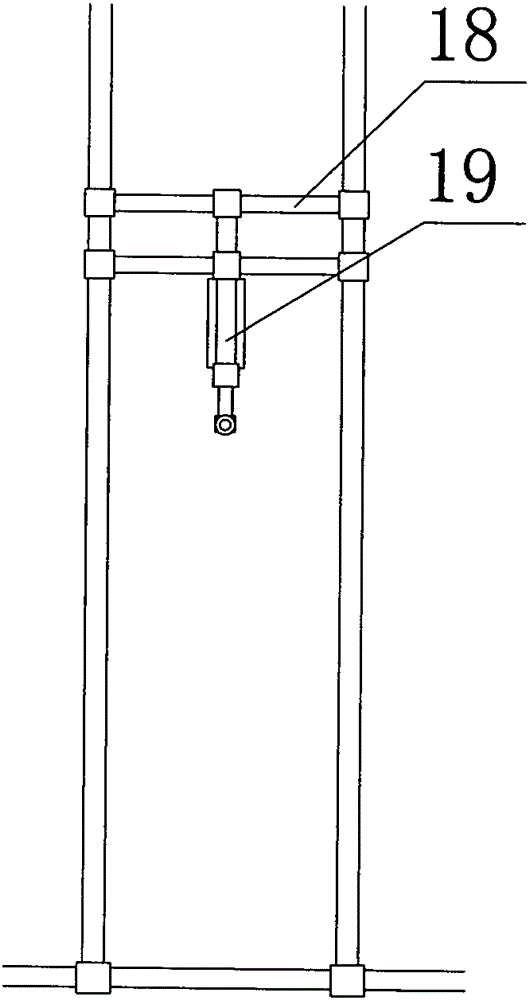
[0021] Such as figure 1 , image 3 and Figure 4 As shown, the automatic piping system of an offshore drilling platform includes a derrick 1, at least one set of pipe grabbing devices 2 for grabbing and discharging drill pipes 6, a hydraulic catwalk 3 matched with the pipe grabbing devices, and a pipe grabbing device associated with The matching mouse hole 4 and the PLC control device (not shown in the figure) controlling the overall system, the derrick 1 is fixed on the drilling platform 5, and the hydraulic catwalk 3 is used to transport the drill pipe 6 to the designated position, so as to facilitate the installation of the pipe grabbing device. Grabbing; the mouse hole 4 is fixed under the drilling platform to provide space for the docking of the drill pipe; the pipe grabbing device includes: a guide rail column 8 for fixing the mechanical arm 7, and an upper seat 9 connected to the top of the guide rail column 8 in a 360° rotatable manner 1. The lower seat 10 connected ...
Embodiment 2
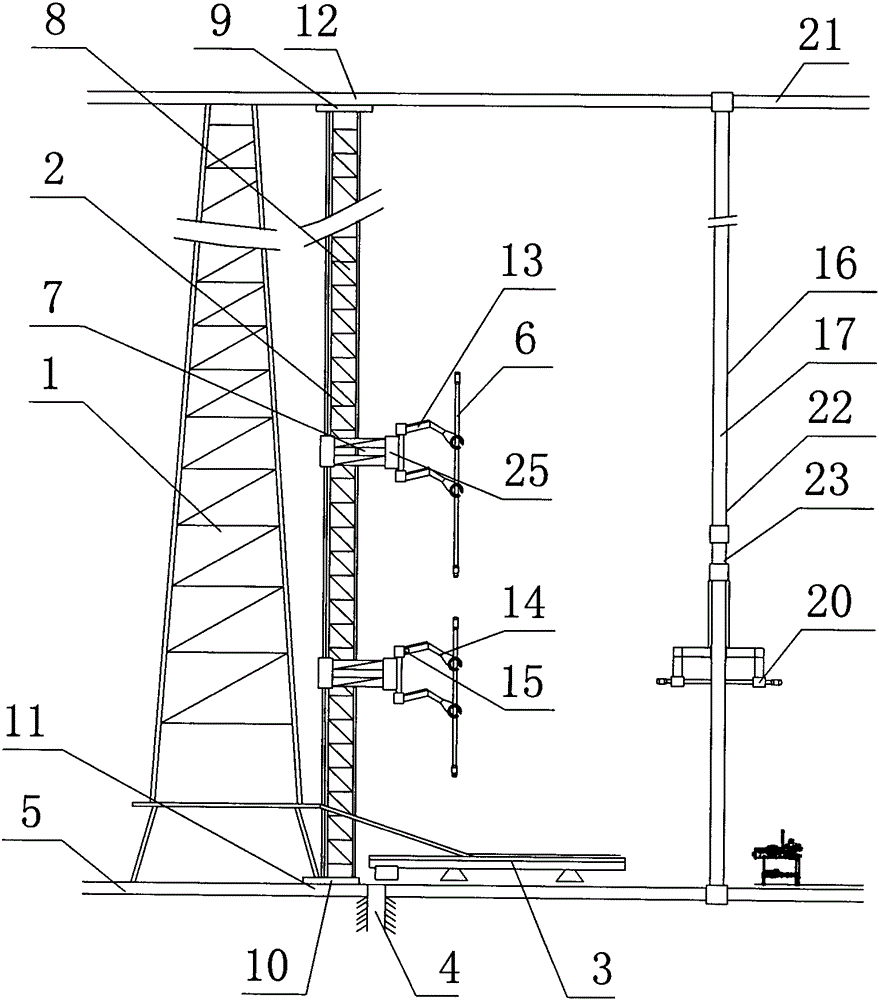
[0039] Such as figure 2 As shown, two grasping hands 13 are provided on the rotary connection seat 25 of the upper mechanical arm, and a pipe grasping hand 13 and an upper and lower buckle device 14 are arranged on the rotary connection seat 25 of the lower mechanical arm. 1. The breaking and breaking device 14 is located above the lower pipe gripping hand 13, and a torque real-time monitoring and controlling device 15 is arranged on the upper and breaking breaking devices 14 at the same time.
[0040] Other structures of this embodiment are the same as those of Embodiment 1.
Embodiment 3
[0042] Such as Figure 5As shown, three grasping hands 13 are provided on the rotary connection seat 25 of the upper mechanical arm, and two pipe grasping hands 13 and an upper and lower buckle device 14 are arranged on the rotary connection seat 25 of the lower mechanical arm. 1. The breaking and breaking device 14 is located above the lower pipe gripping hand 13, and a torque real-time monitoring and controlling device 15 is arranged on the upper and breaking breaking devices 14 at the same time.
[0043] Other structures of this embodiment are the same as those of Embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com