A traction device for underwater robot recovery
An underwater robot and traction device technology, applied in the directions of underwater operation equipment, transportation and packaging, ships, etc., can solve the problems of the influence of sea conditions and high danger of underwater robots, and achieve simple and reliable structure, easy operation, and improved safety. and reliability effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be described in further detail below in conjunction with the accompanying drawings.
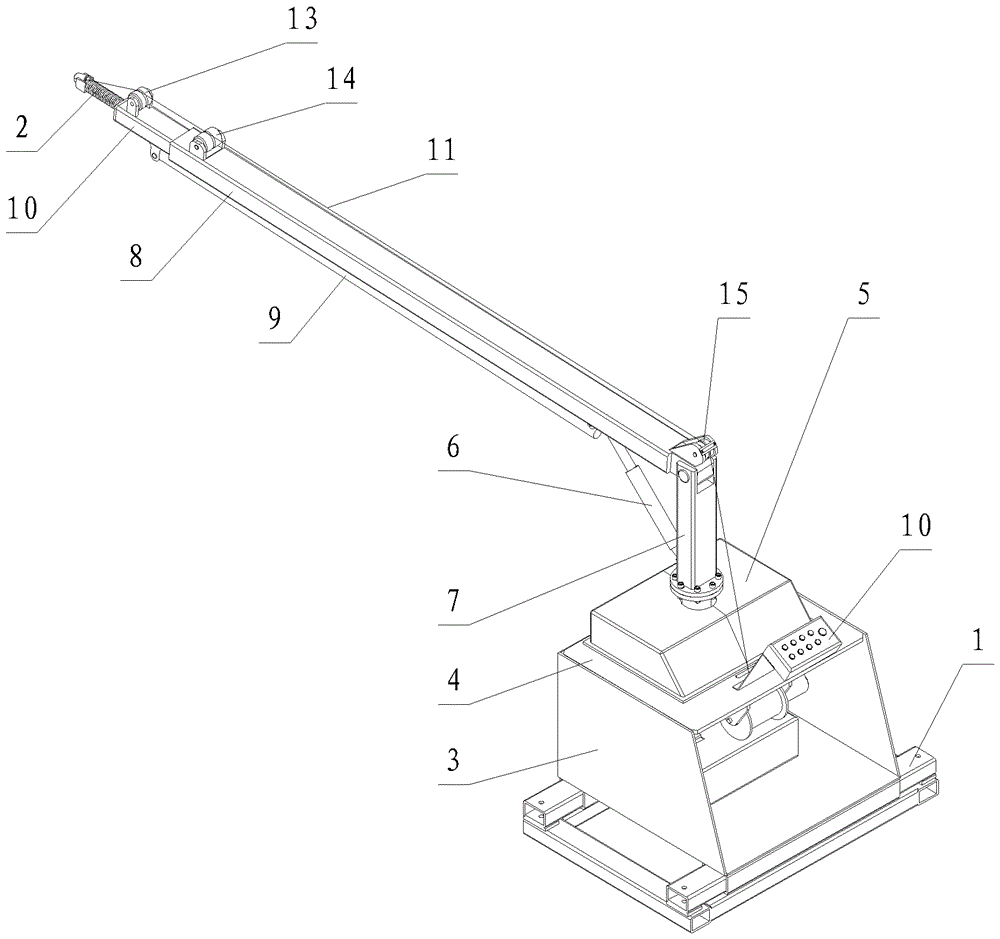
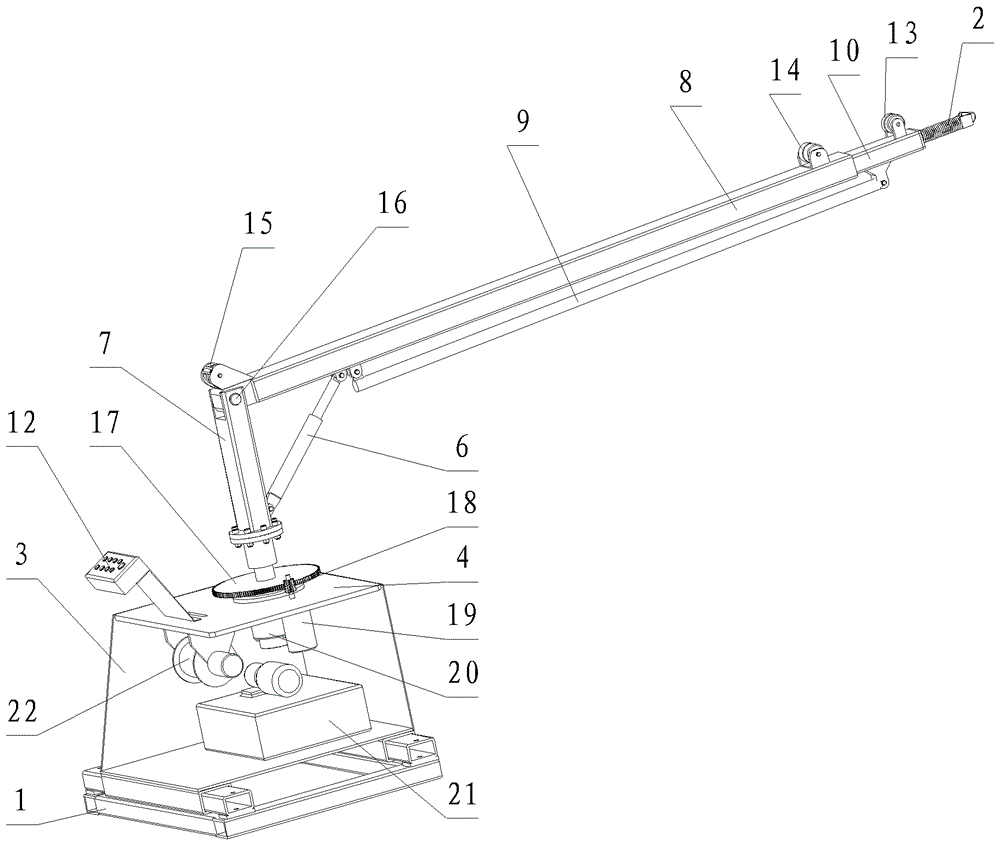
[0019] Such as figure 1 , figure 2 As shown, the present invention includes a fixed base 1, a buffer mechanism 2, a box body 3, a pitching hydraulic cylinder 6, a slewing straight beam 7, a slewing mechanism, a telescopic hydraulic cylinder 9, a hydraulic winch 22 and has three degrees of freedom of slewing, pitching, and stretching. The towing arm, wherein the box body 3 is installed on the mother ship through the fixed base 1, the fixed base 1 is pre-welded with the deck of the mother ship, and then the entire towing device including the box body 3 and the fixed base 1 are connected by bolts, so that this The inventive towing device and the mother ship realize reliable connection, and improve the safety during the towing process while minimizing changes to the mother ship. The box body 3 is provided with an operation panel 12, which is used to centrally ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com