Autonomous navigation and man-machine coordination picking operating system of picking robot
A picking robot and human-machine collaboration technology, applied in the direction of picking machines, agricultural machinery and implements, general control systems, etc., can solve the problems of low picking efficiency, high control complexity, expensive manufacturing and maintenance costs, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The present invention will be further described below in conjunction with the accompanying drawings.
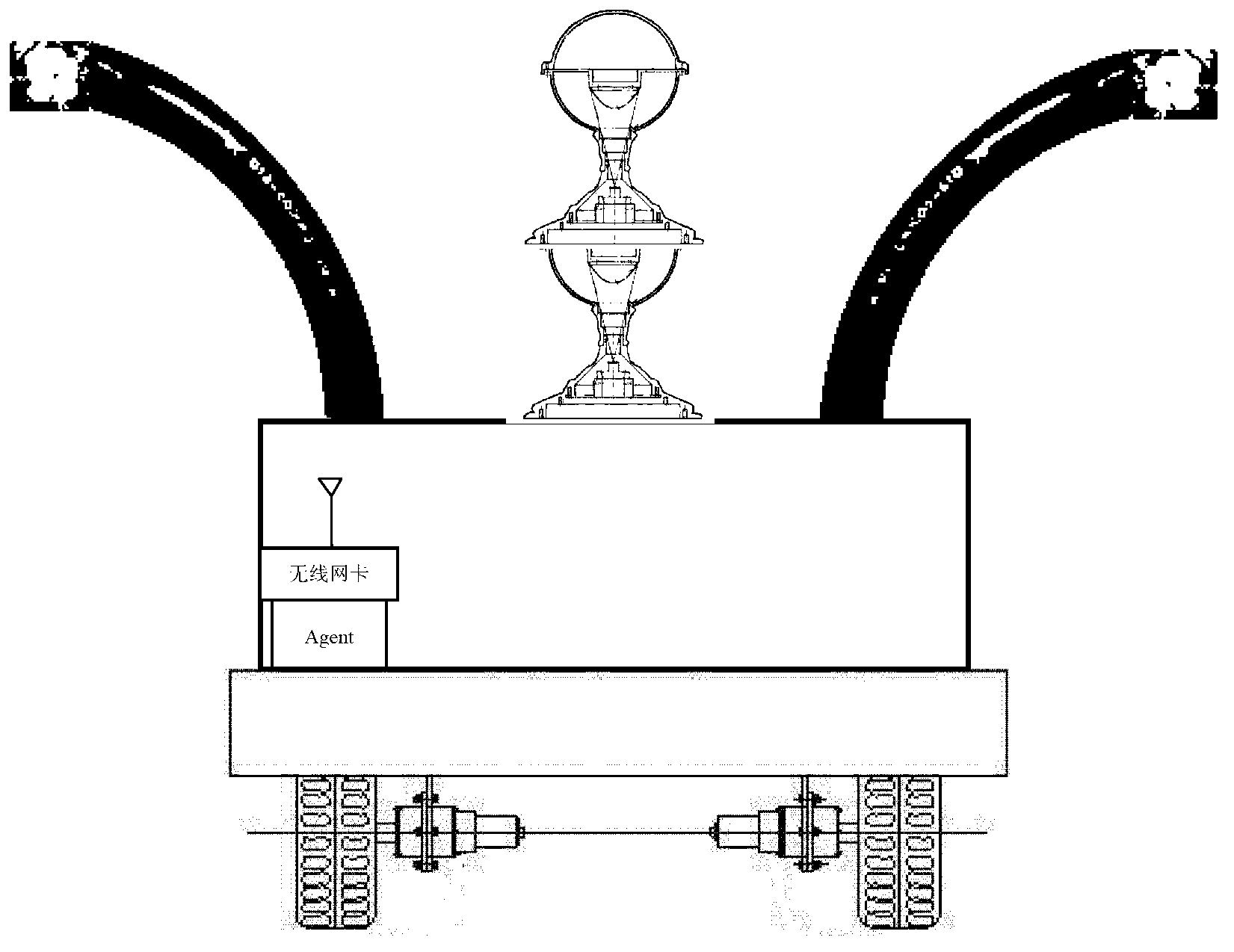
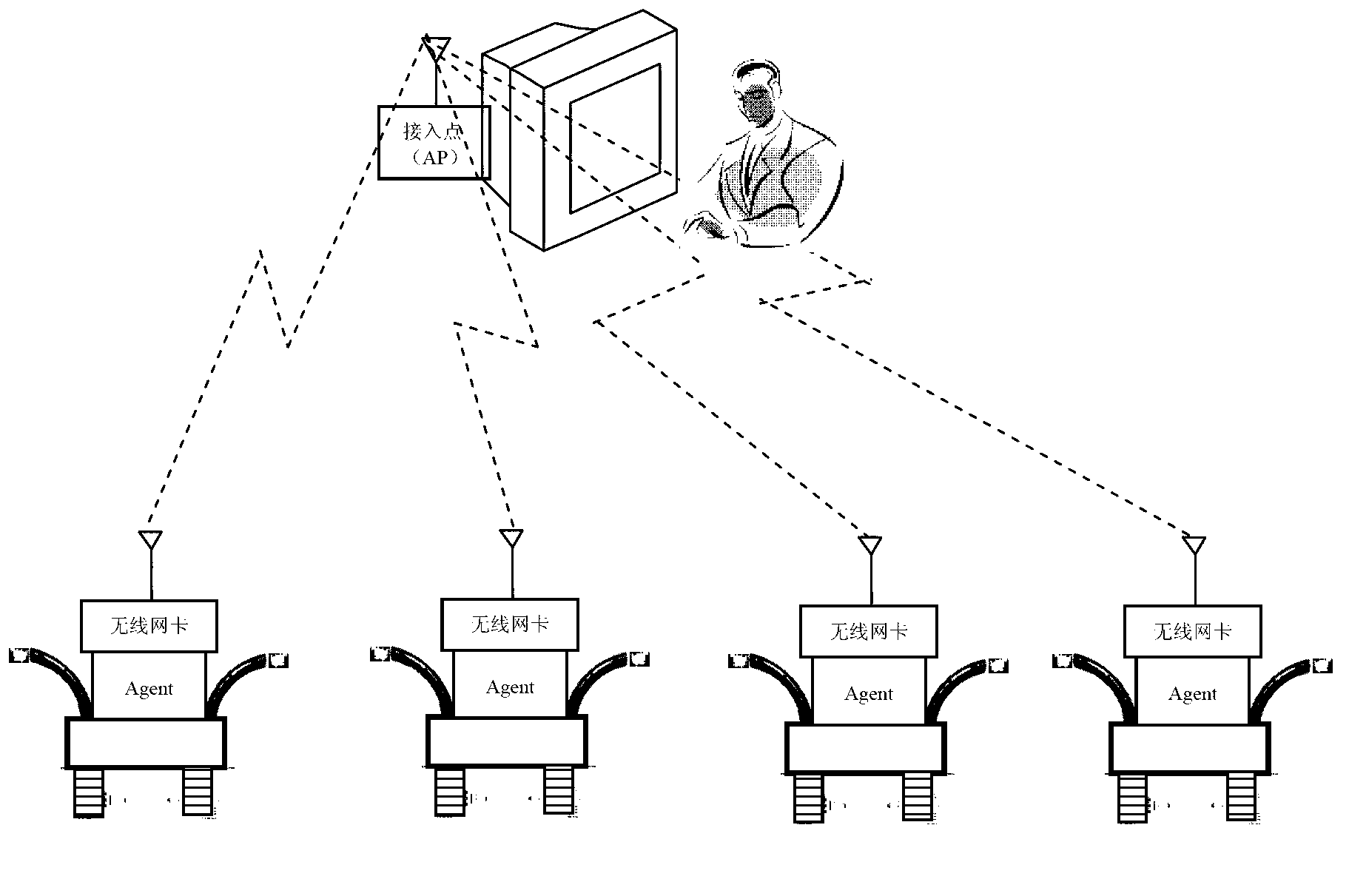
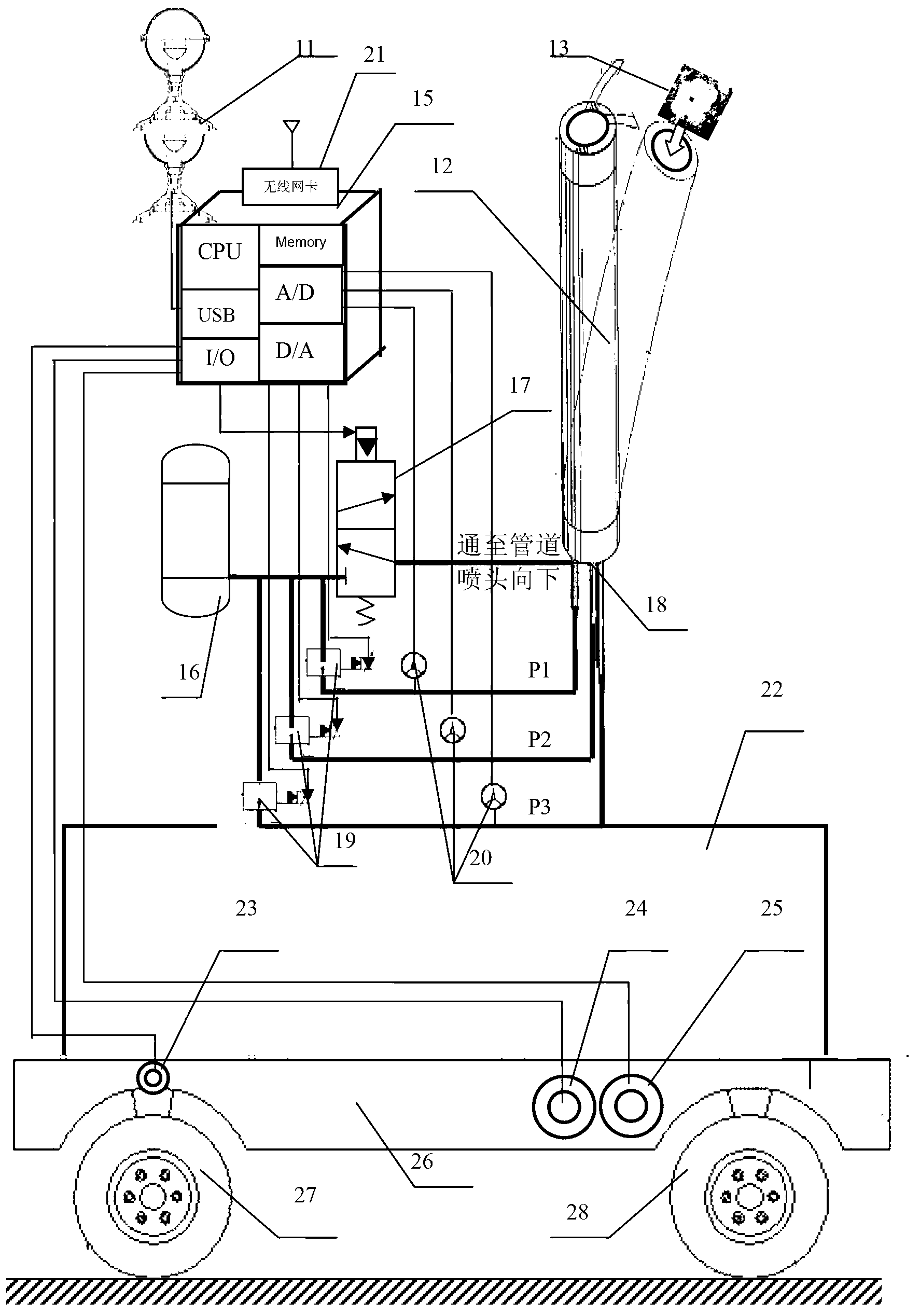
[0074] refer to Figure 1 to Figure 14 , an autonomous navigation and human-machine collaborative picking operation system for a picking robot, including the walking part of the picking robot, the picking robot hand of the picking robot used to pick crop objects, and used to realize the autonomous navigation, obstacle avoidance, positioning and An intelligent body with functions such as path planning, hereinafter referred to as Agent, is used to realize information interaction between humans and picking robots, and can also be used for spatial positioning of picking robots. A computer that conducts comprehensive analysis, processing and judgment of the state, and is used to provide remote intervention and management for picking managers in man-machine collaborative picking operations, a panoramic stereo vision sensor that is used to obtain panoramic stereoscopic video ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com