Automatic file accessing mechanical arm with force protection function
A protection function, automatic access technology, applied in the field of robotics, to achieve the effect of accuracy, simple structure, and accurate operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
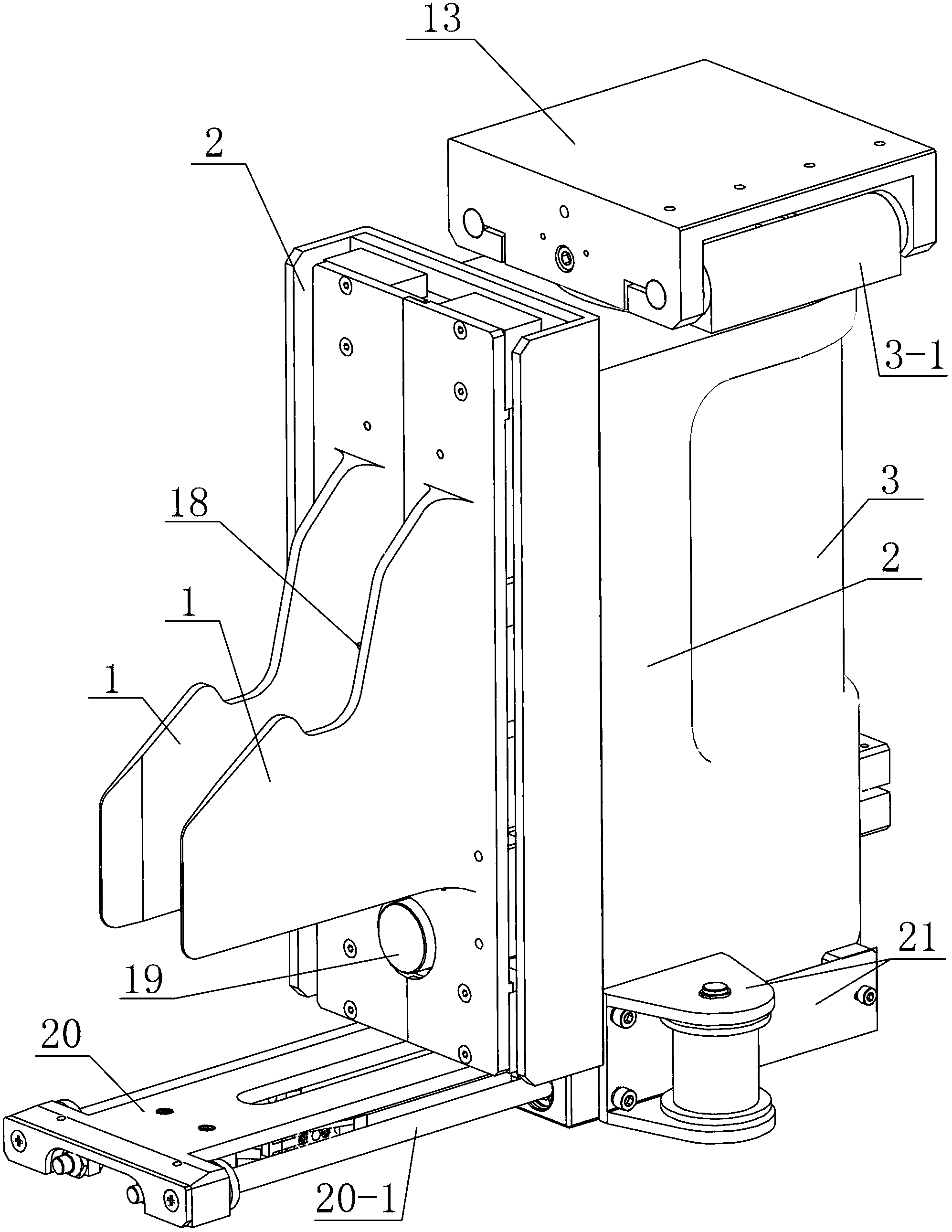
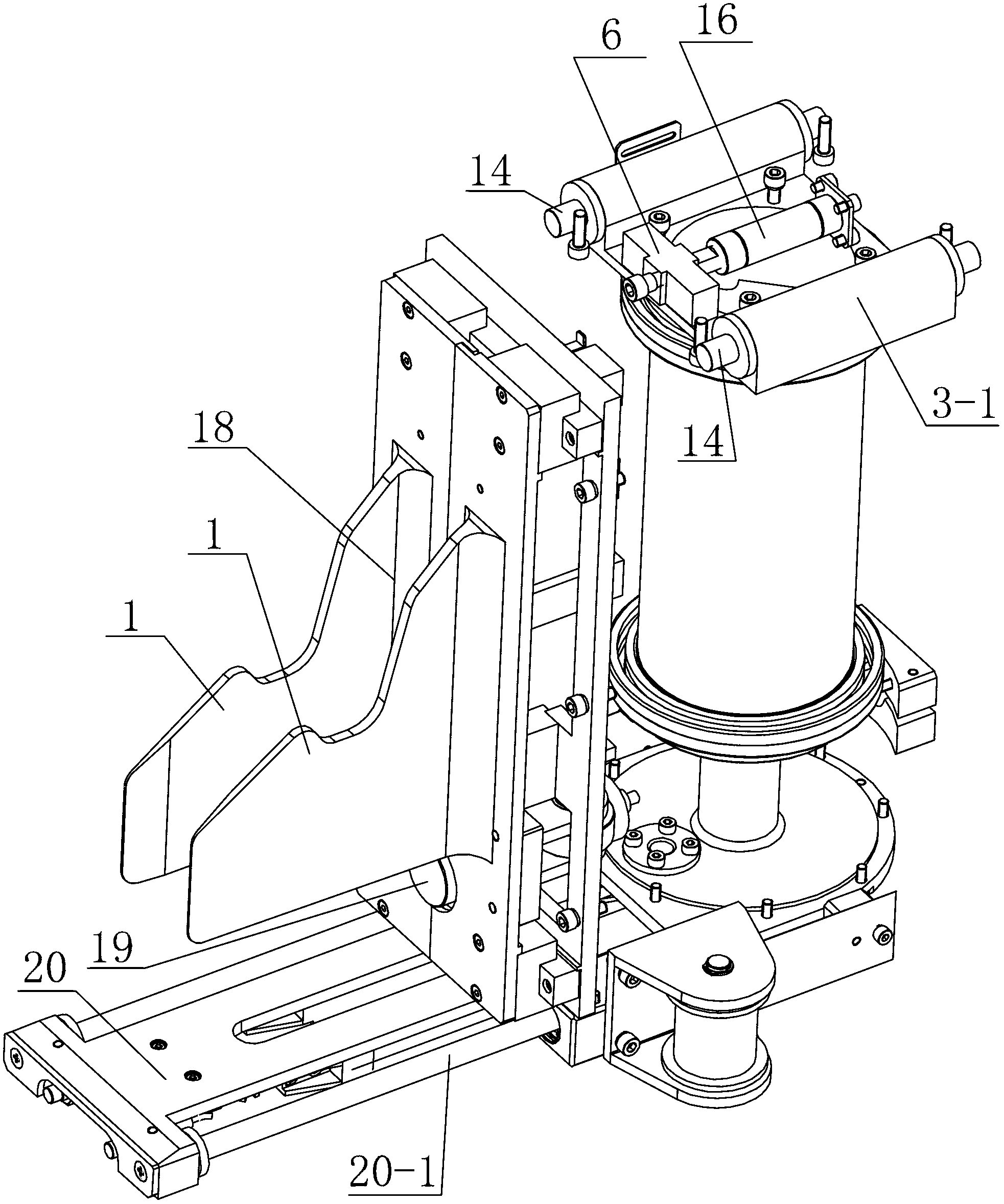
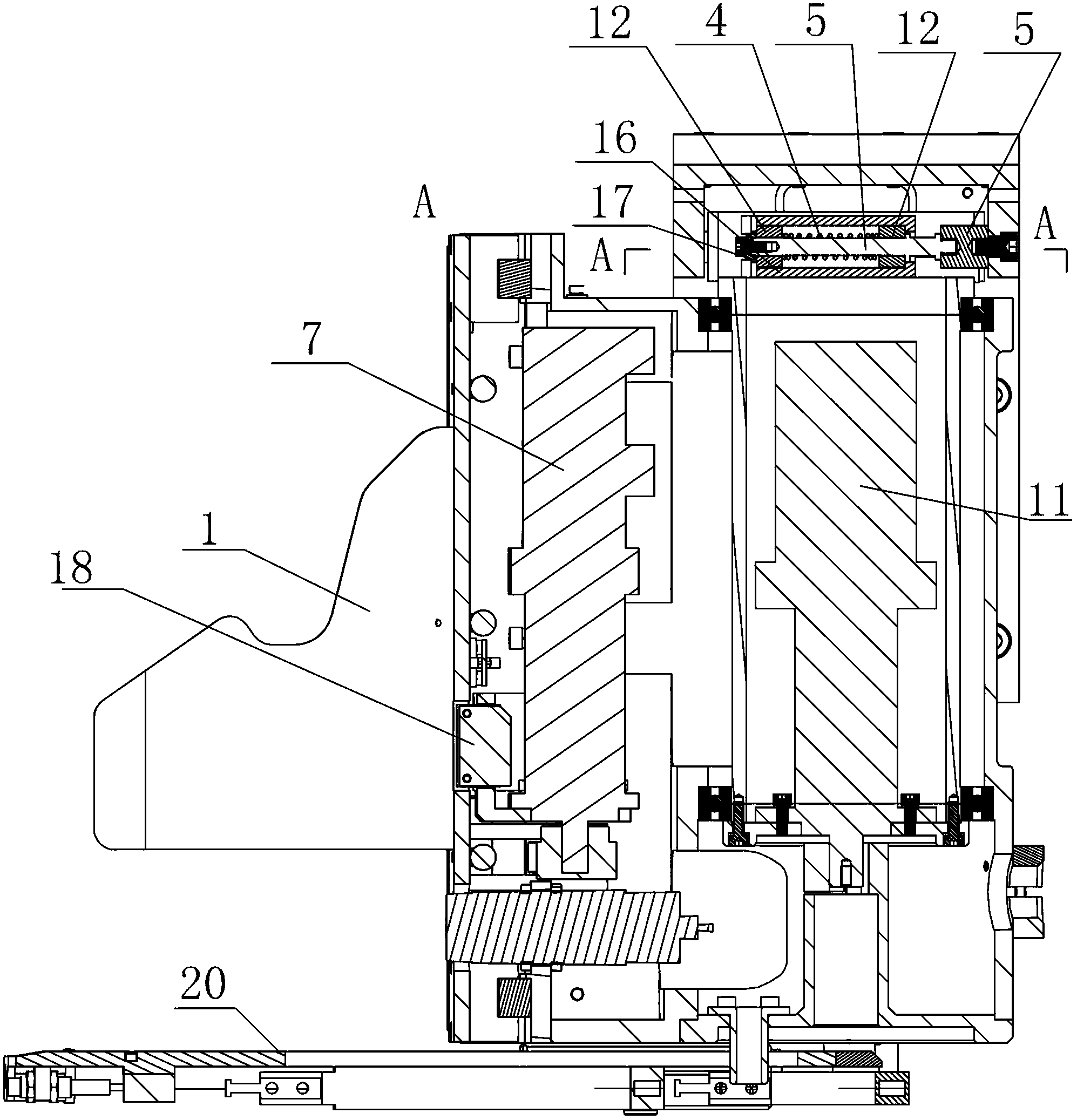
[0008] Specific implementation mode one: as Figure 1-10 As shown, the file automatic access manipulator with the force protection function described in this embodiment includes two fingers 1, a finger drive mechanism, a finger push-pull force sensor buffer structure, a photoelectric sensor 18, an RFID reader 19 and a tray 20. The finger driving mechanism includes a finger housing 2, a finger shaft 3, a finger clamping motor 7, an oval wheel 8, two follower wheels 9, a finger clamping spring 10, and a finger rotation motor 11; the finger push-pull force sensor buffer structure includes a buffer Spring 4, sliding sleeve guide post 5, push-pull force sensor 6, two sliding sleeves 12, finger seat 13, two guide rods 14, four linear bearings 15, outer sleeve 16 and spring plug 17; finger clamping motor 7 Drive the elliptical wheel 8 to rotate. Two follower wheels 9 are arranged on both sides of the ellipse wheel 8 and contact with the ellipse wheel 8 respectively. The centers of th...
specific Embodiment approach 2
[0009] Embodiment 2: The rotation angle of the driving finger housing 2 in this embodiment along the finger shaft 3 is -90°~+90°. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0010] Specific implementation mode three: as Figure 1-10 As shown, the tray 20 in this embodiment is provided with a tray guide post 20-1, and the tray 20 is installed on the bottom of the finger housing 2 through a constant force spring 21, so that the tray 20 is in a protruding state in a normal state. , when the protruding end face of the tray 20 touches an obstacle, it will retract into the bottom of the finger housing 2 . Other compositions and connections are the same as those in Embodiment 1 or 2.
[0011] Working principle of the present invention and the elaboration of working process:
[0012] Working process: first the claws (the present invention) move to the bookshelf where the file box is located, first insert two fingers 1 into both sides of the file box 22 erected on the bookshelf, then read the RFID code carrier information at the spine of the file box, confirm Clamp the file box 22 after being correct and pull it out, put it on the tray 20, after confirmi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com