Point cloud precise registering method based on gravity center Euclidean distance
A technology of Euclidean distance and precise registration, which is applied in image data processing, instrumentation, calculation, etc., and can solve problems such as being easily disturbed by outliers and slow operation speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with the accompanying drawings.
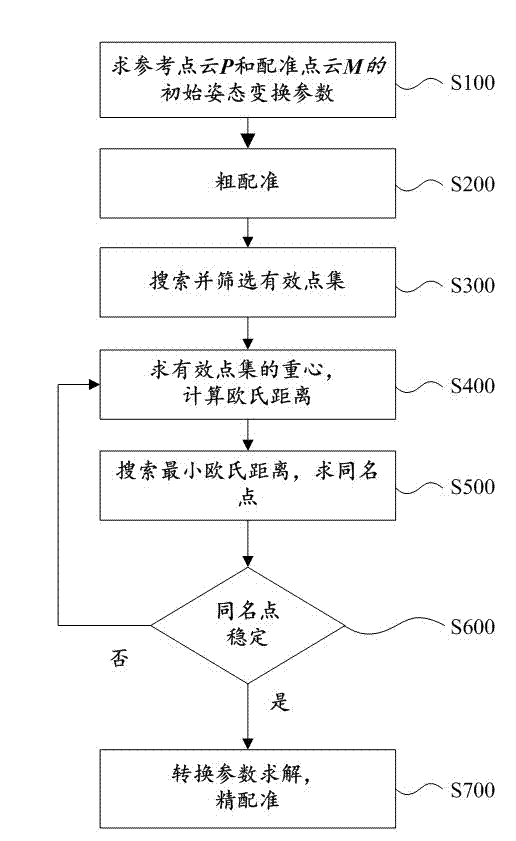
[0034] like figure 1As shown, for a given reference point cloud P and matching point cloud M with a certain degree of overlap, the point cloud P and M are roughly registered according to the initial attitude transformation parameters obtained based on discrete point features; by screening points, Obtain the effective corresponding point sets of the overlapping parts of adjacent point clouds; find the center of gravity of each effective point set and the Euclidean distance of all points in each point set relative to its center of gravity; determine the point with the same name based on the approximately equal Euclidean distance, and solve the global Points with the same name; repeatedly calculate the center of gravity of the effective point set and the corresponding Euclidean distance until the number of global points with the same name is stable. The conversion parame...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com